
Mao YE, Pinquan WANG, Yiqiang ZHAO, Rui CHEN, Bin HU, Guoqing ZHOU. A Denoising Method for LiDAR Bathymetry System via Multidimensional Temporal-spatial Analysis[J]. Acta Photonica Sinica, 2021, 50(9): 0907001
- Acta Photonica Sinica
- Vol. 50, Issue 9, 0907001 (2021)
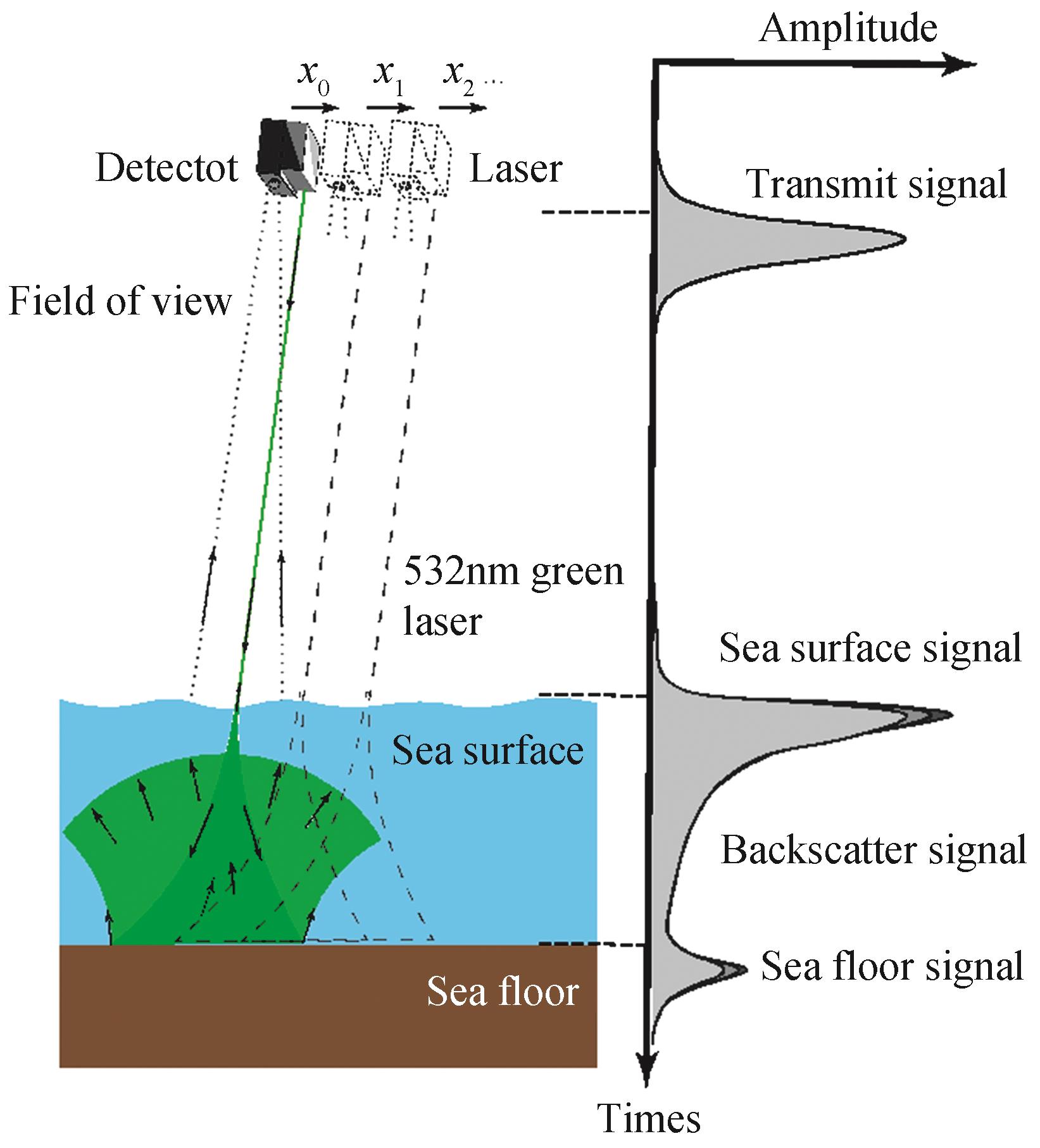
Fig. 1. Temporal-spatial correlation in multiple periods of echo signals
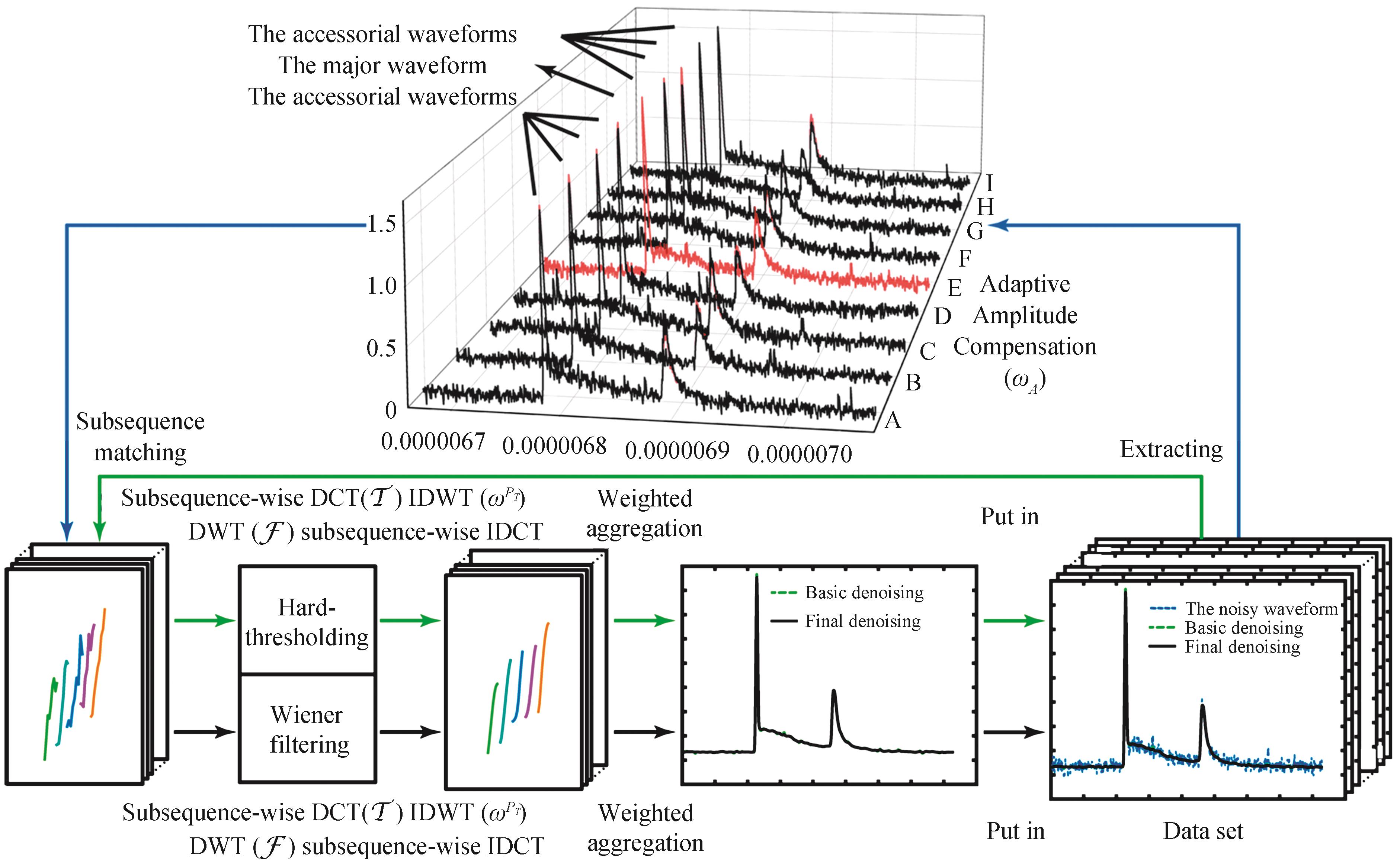
Fig. 2. Framework of temporal-spatial joint denoising method
Fig. 3. Comparison on processing characteristic waveform by AGGF, Wavelet Filter, Wiener Filter and proposed method
Fig. 4. Results of processing continuous characteristic waveforms by basic denoising and final denoising
Fig. 5. Per-frame MSE and PSNR value of different methods
Fig. 6. Comparison on processing simulation waveform by AGGF, Wavelet Filter, Wiener Filter and proposed method
Fig. 7. Results of processing continuous simulation waveforms by basic denoising and final denoising
Fig. 8. Seafloor point cloud of waveform set denoised by different methods
Fig. 9. Comparison on processing measured waveform by AGGF, Wavelet Filter, Wiener Filter, and proposed method
Fig. 10. Results of processing continuous measured waveforms by basic denoising and final denoising
|
Table 1. MSE and PSNR values of different noise variance in simulated experiment
|
Table 2. SD and MAE values between depth extracted from denoised waveform set and true depth


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20