
Miao Wu, Yu Lu, Tianyi Mao, Weiji He, Qian Chen. Time-correlated multi-depth estimation of Single-photon lidar[J]. Infrared and Laser Engineering, 2022, 51(2): 20210885
- Infrared and Laser Engineering
- Vol. 51, Issue 2, 20210885 (2022)
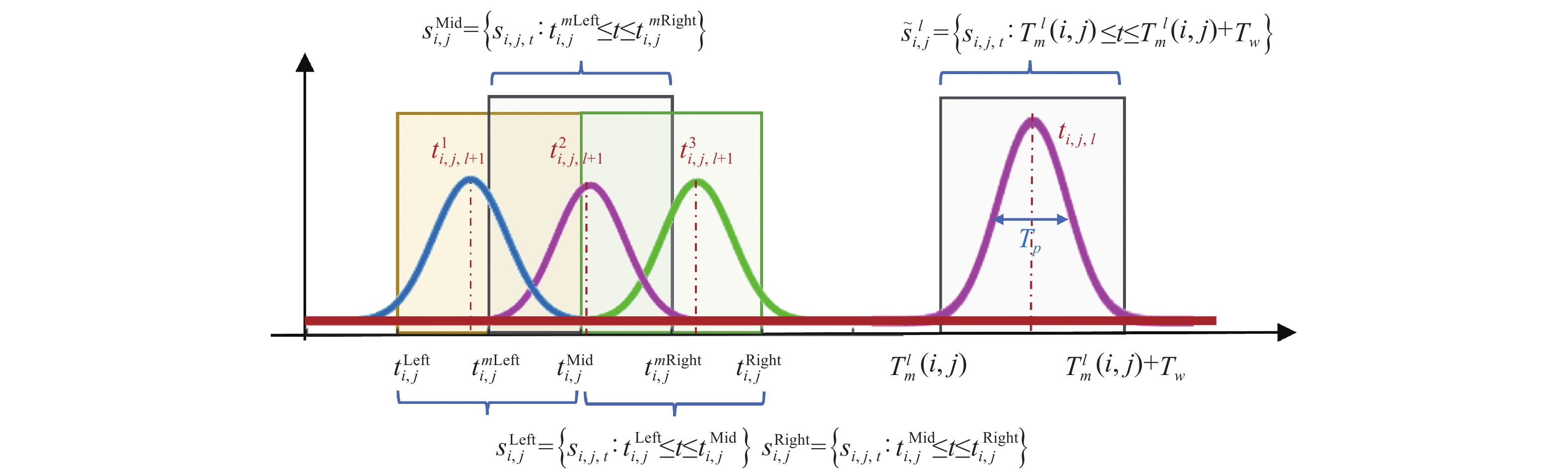
Fig. 1. Illustrative example of the multi-depth fast-denoising method
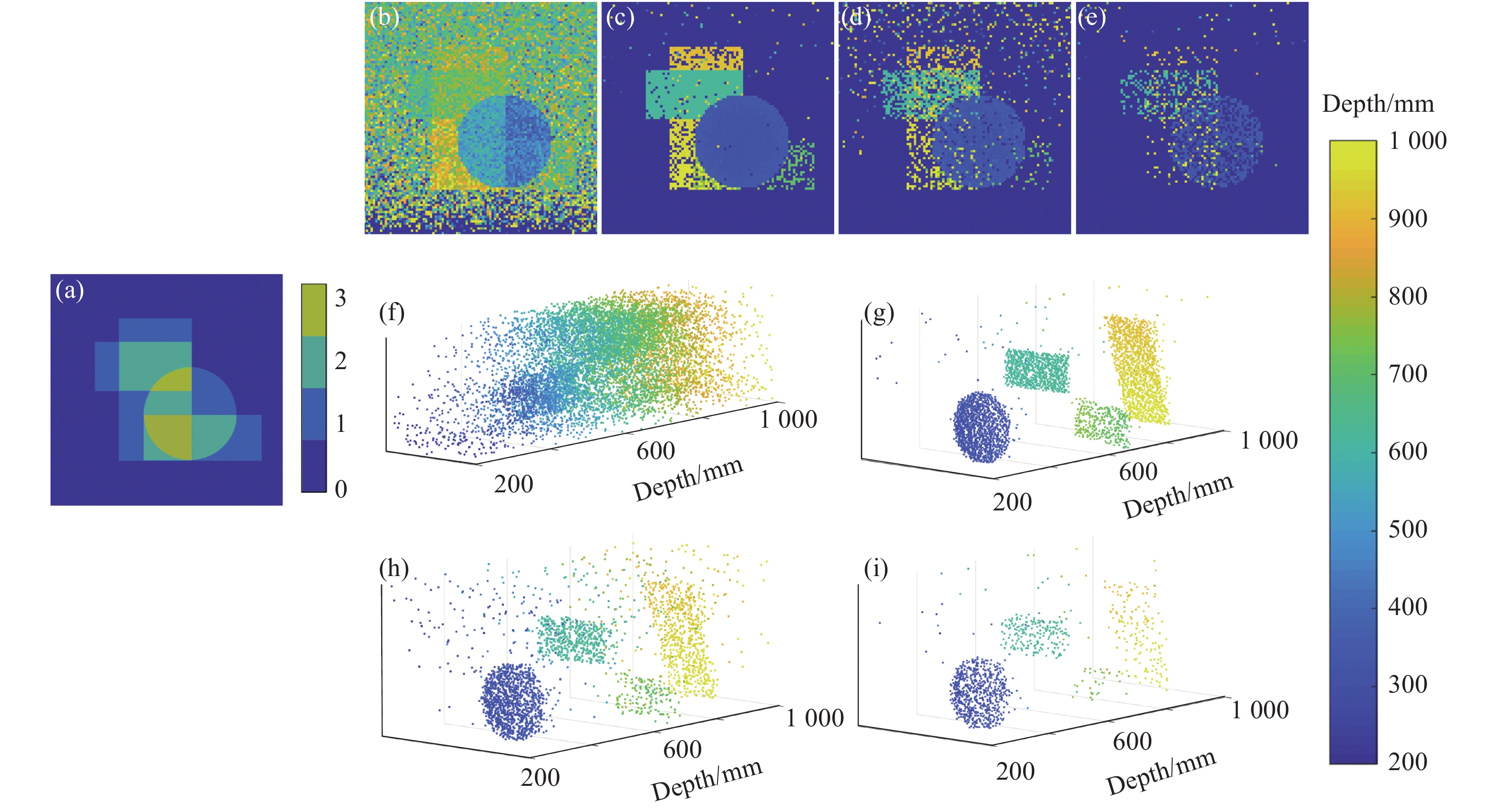
Fig. 2. Depth images and 3D point clouds of s of geometric shapes under different PPP and SBR. (a) Surfaces per pixel on geometric shapes; (b) Depth image estimated by MLE under PPP =11.12, SBR =3.40; (c)-(e) Depth images estimated by the proposed method respectively under PPP =11.12 and SBR =3.40, PPP =2.33 and SBR =0.99, PPP =1.08 and SBR =0.13, and (f)-(i) the corresponding 3D point clouds
Fig. 3. Depth images of the art scene. (a) Reference; (b)-(g) MLE, FDTCP, Rapp, SPISTA, ManiPOP, and proposed method, respectively
Fig. 4. 3D point clouds of the art scene. (a) Reference; (b)-(g) MLE, FDTCP, Rapp, SPISTA, ManiPOP, and proposed method, respectively
Fig. 5. Schematic diagram of long-range single-photon lidar system
Fig. 6. Complex buildings at 1 km. (a) Visible-band image; (b) Histogram of test dataset
Fig. 7. Depth images of complex buildings. (a) Reference; (b)-(g) MLE, FDTCP, Rapp, SPISTA, ManiPOP, and proposed method, respectively
Fig. 8. 3D point clouds of complex buildings. (a) Reference; (b)-(g) MLE, FDTCP, Rapp, SPISTA, ManiPOP, and proposed method, respectively
|
Table 1. RMSE, SRE and processing time of different methods on the art scene
|
Table 2. RMSE, SRE and processing time of different methods on complex buildings


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20