
Linmei ZHU, Xiucheng DONG, Zhengyu ZHANG, Fan ZHANG, Haibin WANG, Lei REN. Camera Pose Estimation Algorithm for Singular Configuration of Target Points[J]. Acta Photonica Sinica, 2021, 50(7): 285
- Acta Photonica Sinica
- Vol. 50, Issue 7, 285 (2021)
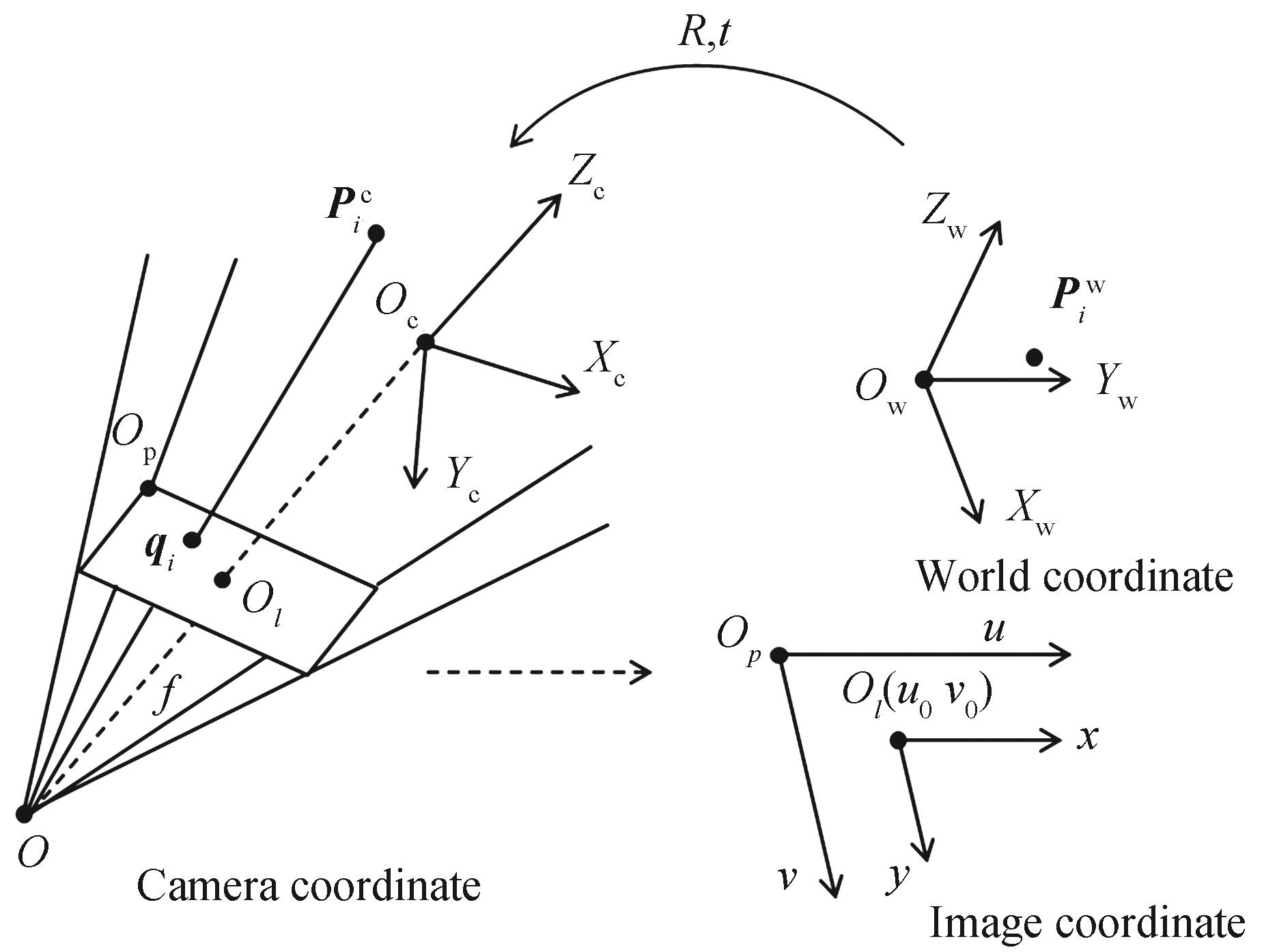
Fig. 1. Camera imaging model
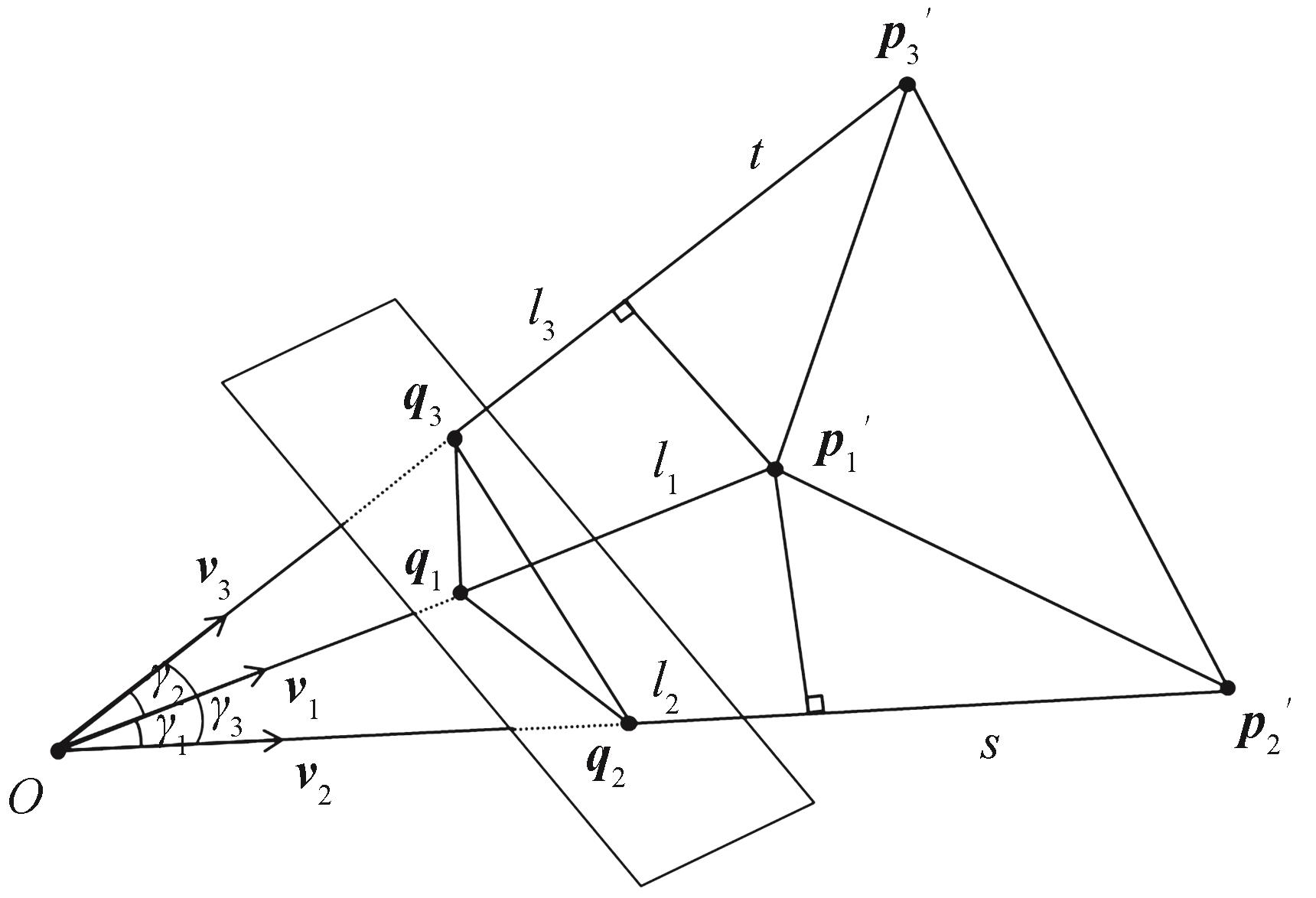
Fig. 2. Schematic diagram of PST algorithm
Fig. 3. Center of gravity position diagram
Fig. 4. Central position diagram
Fig. 5. Simulation result with respect to varying numbers from 4 to 15 in ordinary-3D point configuration
Fig. 6. Simulation result with respect to varying numbers from 4 to 15 in quasi-linear point configuration
Fig. 7. Simulation result with respect to varying numbers from 4 to 15 in planar point configuration
Fig. 8. Simulation result with respect to varying noise levels from 0.5 to 5 in case of ordinary-3D configuration when point number n =4
Fig. 9. Simulation result with respect to varying noise levels from 0.5 to 5 in case of ordinary-3D configuration when point number n =5
Fig. 10. Experimental environment configuration
Fig. 11. The target points of pose experiment
Fig. 12. Re-projection error of image plane
|
Table 1. Running time of different algorithms
| |||||||||||||||||||||||||||||||||||
Table 2. The average result of re-projection error


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20