
Chunhui Wang, Aoyou Wang, Wei Rong, Yuliang Tao, Ruimin Fu. Adaptive Denoising Algorithm for Photon-Counting LiDAR Point Clouds[J]. Laser & Optoelectronics Progress, 2021, 58(14): 1428001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 14, 1428001 (2021)
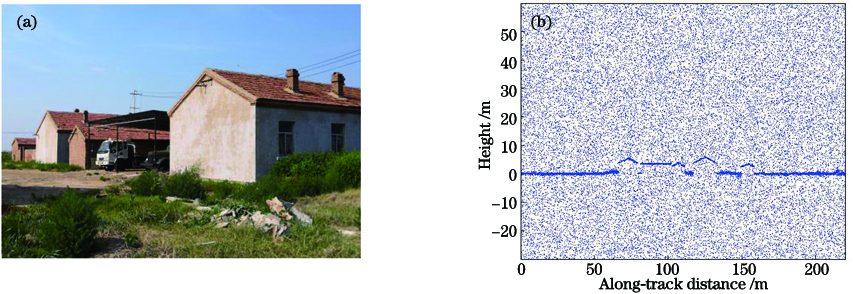
Fig. 1. Airport building photos and point cloud data. (a) Airport building; (b) point cloud data
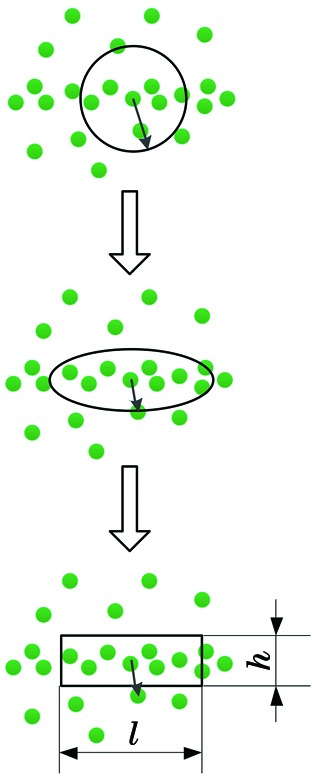
Fig. 2. Change process of the search area shape
Fig. 3. Flow of the denoising algorithm
Fig. 4. Statistical histogram of the neighborhood density
Fig. 5. Neighborhood density of noise points after fitting
Fig. 6. Denoising result of the point cloud. (a) Noise and signal points after processing; (b) partial enlarged view
Fig. 7. Fitting result of the airport building contour
Fig. 8. Processing results of the MABEL point cloud data. (a) No.6; (b) No.8; (c) No.3; (d) No.9
|
Table 1. Fitting error of the airport building contour
|
Table 2. Effect of θ on algorithm recognition rate and accuracy
|
Table 3. Effect of search area on algorithm recognition rate and accuracy
|
Table 4. MABEL point cloud data
|
Table 5. Processing parameters and results of MABEL point cloud data

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20