1School of Precision Instrument and Opto-Electronics Engineering, Key Laboratory of Micro Opto-electro Mechanical System Technology, Institute of Optical Fiber Sensing of Tianjin University, Tianjin Optical Fiber Sensing Engineering Center, Key Laboratory of Opto-Electronics Information Technology (Tianjin University), Ministry of Education, Tianjin 300072, China
2School of Computer and Information Engineering, Tianjin Chengjian University, Tianjin 300384, China
A flow measurement system consisting of an optical fiber Fabry–Perot (F-P) sensor and an elbow tube is proposed and demonstrated to realize flow measurements and eliminate thermal disturbance. Two F-P sensors are symmetrically mounted on the inner-wall surface of the elbow of 90° in order to eliminate the effect of thermal disturbance to the flow measurement accuracy. Experimental results show that the absolute phase difference is the square root of the fluid flow. It is consistent with the theoretical analysis, which proves that the flow measurement method can measure flow and eliminate the influence of thermal disturbance simultaneously.
Flow measurement is widely needed in many applications, such as the oil industry, urban water supply, and gas transport in a tube. Traditional flow detecting methods, such as vortex-type, hot wire anemometer, electromagnetic-type, and venture-type flowmeters, are widely used[1,2]. However, high temperature, high pressure, high electromagnetic interference, and other harsh environments limit the use of traditional flowmeters. The optical fiber sensor has the advantages of immunity to electromagnetic interference, corrosion resistance, resistance to high temperatures and high pressure, and the realization of long distance measurement. So, it has been widely applied in various industries[3]. There are intensive studies on optical sensing of strain, temperature, pressure, accelerometer, vibration, etc.[4–7]. For instance, a fiber optic Fabry–Perot interferometer (FFPI) fiber Bragg grating (FBG) sensor could be used to measure thermal property of a silica-based fiber[8], while the Fabry–Perot (F-P) sensor could measure the reflective index and temperature simultaneously[9], using the research on magnetic sensing based on fiber loop ringdown that has been done[10]. However, research on the flow test method based on the optical fiber sensor is limited. Lu et al. proposed a vortex-shedding-type flowmeter based on an FBG that had a mounted FBG sensor on a cantilever immersed into fluid[11]. But, the method would disturb the fluid distribution and lead to viscous or turbid fluid in the tube block. Since an optical fiber F-P sensor is more sensitive to flow pressure, Cheri et al. reported a flow test method based on an F-P sensor[12], proving that using an F-P sensor in a venture can realize flow measurement of microfluidics[13–16]. When the temperature of a tested fluid is changed, the length of the cavity of the F-P sensor will shift and lead to a reduction in the precision of the differential pressure measurement[17,18]. So, to eliminate the effect of thermal disturbance of fluid is critical, because when the temperature affects the fluid state, it leads to a variation of flow. However, the optical fiber F-P flow measurement methods reported so far have not achieved the elimination of thermal disturbance and undisturbed fluid.
In this Letter, we present a fluid flow measurement system to eliminate thermal disturbance based on an F-P sensor. The F-P flow measurement system (F-PFMS) adopts an elbow of 90° to form differential pressure of flowing fluid into the tube. It is worthwhile to note that the angle of the elbow can be adjusted to satisfy the requirements of specific applications. Two F-P sensors are symmetrically installed in the inner-wall surface of the elbow to detect the pressure.
The flow measurement is based on the force swirl flow. The centrifugal force occurs when the fluid goes through the bend structure. It forms the angular acceleration, and this induces the differential pressure between the wall of the inner and outer circles of the elbow[19], which is proportional to the average velocity of fluid.
Sign up for Chinese Optics Letters TOC. Get the latest issue of Chinese Optics Letters delivered right to you!Sign up now
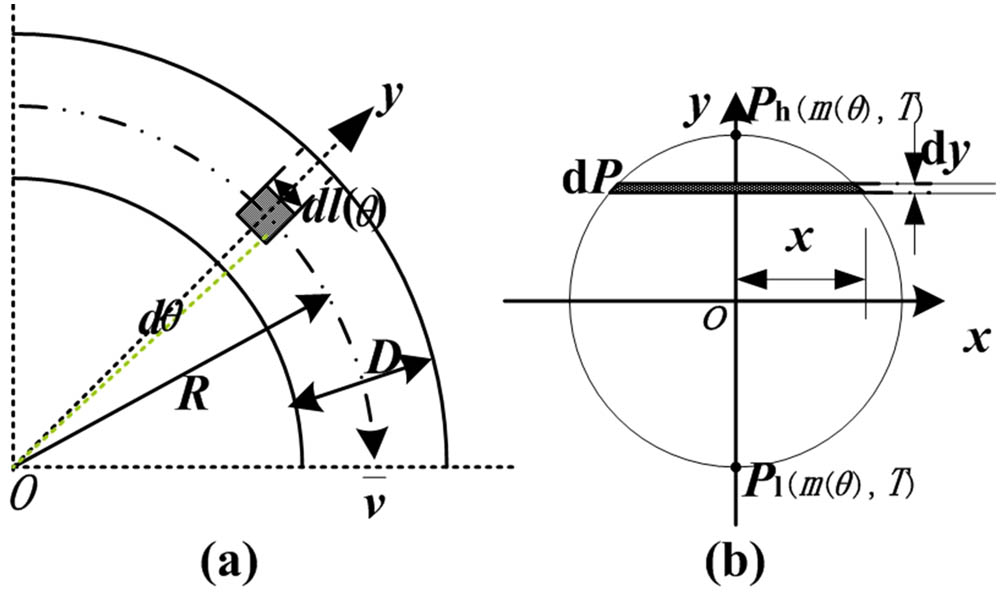
The elbow structure is shown in Fig. 1. When the flow of the fluid in the bend structure meets the force swirl flow theory based on the theoretical analysis in Ref. [19], considering the temperature of fluid shifting in elbow, the flow should be expressed as where and denote the diameter and centerline curvature radius of the elbow, respectively, , , and represent the high pressure and low pressure of the elbow tube, denotes the density of fluid effected by of the fluid in the elbow because it shows that the differential pressure of fluid in the elbow is the square root of flow in the tube.
Figure 1.Theoretical analysis diagram of the elbow structure.
The elbow structure is designed with a partial bend angle of 90° because of the symmetrical pressure distribution, smaller initial pressure jump, and significant pressure concentration in the elbow[20]. The pressure detecting positions are symmetrically set on the 45° section. The inner diameter of the elbow is 30 mm, and . The smooth transition is adopted in order to connect the bend part and the straight part. The length of straight pipe is over 150 mm, which is shown in Fig. 2.
Figure 2.Partial bend structure used in the F-PFMS.
The F-P pressure sensors are used for differential pressure detection. The F-P cavity is evacuated to reduce the influence of thermal fluctuation to the F-P sensor. Pressure changing leads to a shift of cavity length by following the linear relation [21], where and represent the diameter and thickness of the silicon diaphragm, denotes the Young modulus, and is the Poisson ratio of silicon.
The demodulation method of the optical path difference (OPD) of the F-P sensor is based on low-coherence interferometry (LCI). An LED with the Gaussian light is adopted as the source. When the silicon diaphragm detects the pressure and reflects the light, the OPD is scanned by the birefringent wedge of the demodulation system. The F-P sensor structure and demodulation unit are shown in Fig. 3.
Figure 3.Schematic layout of the optical fiber F-P sensor and space low-coherence demodulation unit.
Based on the analysis, the signal of the F-P sensor can be considered as approximatly low-coherence double-beam interference and expressed as[22]where , , is the OPD with , and , is the phase angle of the LCI fringes the Shape of the LCI fringes is shown in Fig. 3. denotes the wedge thickness, represents the wave number, is the center wave number, denotes the center wavelength of the light source, is a 3 dB spectral width, , , is the differential refractive slope ratio, and is the refractive index difference between the E ray and the O ray:
Considering the thermal characteristic of the silicon diaphragm of the F-P sensor, the temperature fluctuation will lead to an additional absolute phase (AbPhase) angle shift , where is the sample point in the frequency domain. The AbPhase angle produced by the detected pressure can be described as , so the AbPhase angle can be expressed as
So, the thermal disturbance should not be ignored when the F-P pressure sensor is applied in the environment with a temperature shift. Based on the preliminary study, we know that there is a linear relationship between the AbPhase and pressure combined with the temperature, so the tested pressure can be calculated by . The differential pressure of the high pressure and low pressure in the F-PFMS is shown as
When the AbPhase slope ratios of two F-P sensors are similar, , and the additional phases caused by the thermal disturbances of high pressure and low pressure can also be considered the same; , when is small enough to be ignored. So, the differential pressure should be written as , and . After substituting Eq. (5) into Eq. (1), the flow of the fluid in the elbow is expressed as
It shows that there is a linear relation between fluid flow in the elbow and the square root of the differential AbPhase. It means that the flow test accuracy of the F-PFMS only depends on the differential pressure of the fluid flow in the elbow, and it is theoretically not affected by the thermal disturbance.
The experimental platform is shown in Fig. 4. Two F-P sensors with thicknesses of 20 μm of a silicon diaphragm are mounted on the determined position of the elbow structure, and the response time of the F-P sensor is better than 0.5 s. The absolute pressure test range of the F-P sensor is from 5 to 300 kPa. In the F-PFMS, the light emitted from the white LED with wavelength of 613 nm is sent to two F-P sensors, and the reflected light is detected in the F-P demodulation module. After the light signal is transferred into the electronic signal by the linear CCD with 3000 pixel points, it is acquired by NI-DAQ Card 6361 with a sample frequency of 2 MHz that is installed in a signal analysis unit. A LabVIEW program has been designed to sample the light–electronic signal, and the signal is analyzed to obtain the differential phase and the fluid flow in the elbow. Flow and temperature control devices are used to control and display the flow and temperature of the fluid in the tube. The accuracy of flow controlling is better than within the range of , and temperature controlling precision is within 0°C–100°C. In the experiments, the fluid of water has been used, and its density could be considered stable when the temperature changes from 10°C to 40°C. If the density of the tested fluid is unknown, the standard flowmeter should be used to realize the calibrated parameters of the F-PFMS.
We have tested the pressure sensing characteristics of the F-P sensor at the temperature range of 10°C–40°C with an absolute pressure range of 70–150 kPa, and the interval of them are 10°C and 10 kPa, respectively. Based on the former work of theoretical simulations we have done[20], the high pressure and low pressure of testing points on the elbow alters from 80 to 105 kPa when the flow of fluid in the elbow changes from 0.8 to . In order to study the characteristics of the F-P sensor clearly, we chose the experimental pressure range that has been mentioned.
Figure 5(a) shows that there is a linear relation between the tested pressure and the AbPhase with a correlation coefficient of , the slope ratio is at the setting temperature range of 10°C–40°C, the linear correlation coefficient is better than 0.99, and the slope ratio keeps steady at , which demonstrates that the pressure detecting character of the F-P sensor is stable and temperature insensitive. Lastly, we have done similar experiments to some other F-P sensors. Results show that the slope ratios and of the pressure phase of them are and over 0.99, respectively. It demonstrates that there is a good consistency in the static pressure testing of the F-P sensor.
Figure 5.Thermal stability of the F-P sensor with (a) relationship between the AbPhase and pressure and (b) the pressure testing error at different temperatures.
We have also analyzed the pressure testing error at the setting ranges of the pressure and temperature. From Fig. 5(b) it can be found that at the setting temperature range, the pressure |Error| is lower than 0.6 kPa when the tested pressure is less than 120 kPa, while it is over 1 kPa when the pressure is higher than 130 kPa, so the pressure test accuracy of the F-P sensor is better than 0.5% full scale (F.S) at 10°C–40°C. When the flow of fluid in the elbow tube changes from 0.8 to , the |Error| of 0.6 kPa would result in a flow test deviation of that can be figured out by the preliminary theoretical simulation results, which indicate that the thermal difference should be considered in the F-PFMS.
Finally, the experiments have been done to ensure the correctness of the theoretical analysis, and the results are shown in Fig. 6. The response time of the F-PFMS is 1 s, which has been experimentally proved in our former research[20]. In the experiments, the control range of flow is from 0.8 to at an interval of .
Figure 6.(a) Relationship between and the differential phase, (b) flow test errors of the F-PFMS at 10°C–40°C, and (c) the measurement accuracy of the F-PFMS at .
Figure 6(a) shows that the correlation coefficient of the F-PFMS is better than 0.98 at 20°C, proving that the relationship between fluid flow and the differential AbPhase of the F-P sensors displays a good quadratic expression. The relationship can be shown as
From Eq. (7), we can obtain the sensitivity of the F-PFMS, which is , based on the linear relationship between and the square root of the differential phase. Based on Eq. (7), using the experimental results shown in Fig. 6(a), the sensitivity of F-PFMS can be calculated, and the value is .
The relationship is stable while the temperature of the fluid changes from 10°C to 40°C, which can be found out from Fig. 6(b) at the setting flow scale. Figure 6(b) shows that the flow test error changes from to , which is lower than the theoretical value of that is calculated. It means that the symmetrical mounting structure of the F-P can eliminate the thermal disturbance of fluid in the tube. The flow test error of this system should be caused by the following factors, such as the non-symmetrical installation positions of the F-P sensors, the welding deviation of the bend–straight connection, mechanical installation deviation of elbow, and incomplete consistency of the F-P sensor structures. Figure 6(c) shows that the flow test accuracy of the F-PFMS is 2% at 10°C–40°C when . In brief, the F-PFMS can eliminate the thermal disturbance of fluid in the tube at with a stable flow test performance when the temperature of the fluid is 10°C–40°C.
In conclusion, a flow measurement system based on F-P sensors and an elbow that can eliminate the thermal disturbance is developed. The bend angle of 90° of the elbow is used. The installation positions of two F-P sensors are symmetrically set on the 45° section. The elbow is used to produce differential pressure of flowing fluid in the tube. The two F-P sensors are used to detect the high pressure and low pressure of fluid in the elbow. When the tested flow scales from 0.8 to , the flow test error is from to , and the measurement accuracy is 2% when the flow is over , and thermal disturbance is from 10°C to 40°C. It demonstrates that F-PFMS can measure flow and eliminate thermal disturbance of fluid in the tube simultaneously.
References
[1] Z. Q. Sun, H. J. Zhang, J. M. Zhou. Sens. Acts. A, 136, 2(2007).