
Ming Liu, Qin Shu, Yunxiu Yang, Fei Yuan. Three-Dimensional Point Cloud Registration Based on Independent Component Analysis[J]. Laser & Optoelectronics Progress, 2019, 56(1): 011203
- Laser & Optoelectronics Progress
- Vol. 56, Issue 1, 011203 (2019)
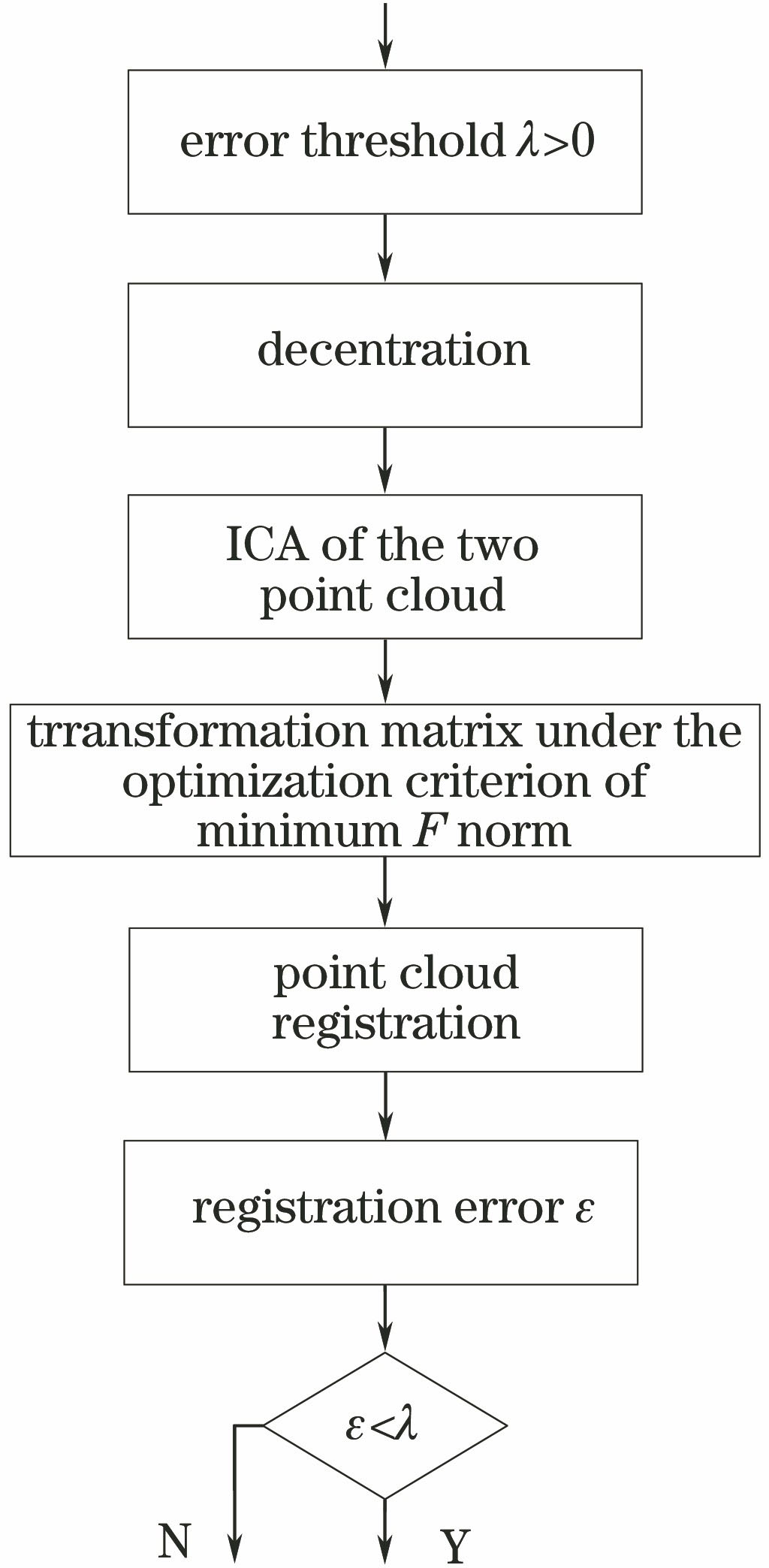
Fig. 1. Flow chart of proposed algorithm
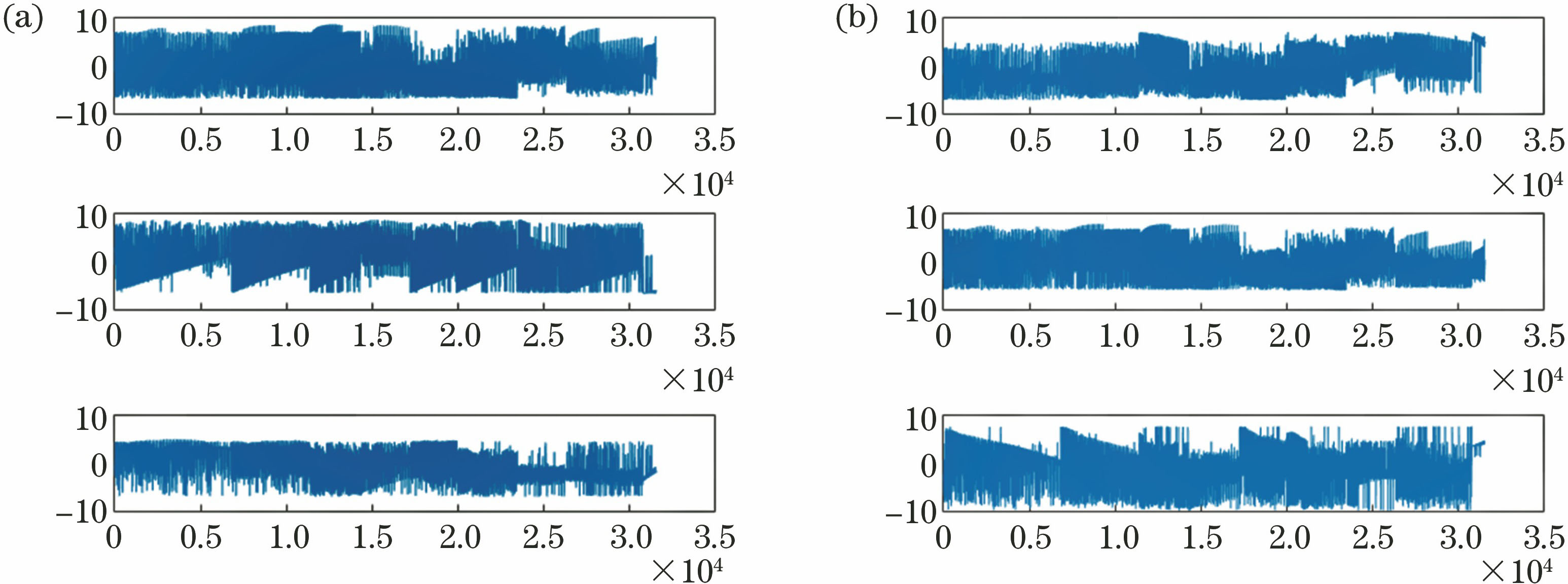
Fig. 2. Point cloud of Bunny. (a) Independent component feature graph of original point cloud; (b) independent component feature graph of unregistered point cloud
Fig. 3. Registration of Bunny.(a) Pre-registration point cloud; (b) registration by the proposed algorithm; (c) registration by scale-ICP algorithm; (d) registration by CPD algorithm; (e) registration by classic ICP algorithm
Fig. 4. Point cloud of Elephant. (a) Independent component feature graph of original point cloud; (b) independent component feature graph of unregistered point cloud
Fig. 5. Registration of Elephant. (a) Pre-registration point cloud; (b) registration by the proposed algorithm; (c) registration by scale-ICP algorithm; (d) registration by CPD algorithm; (e) registration by classic ICP algorithm
Fig. 6. Point cloud registration after adding noise. (a) Pre-registration point cloud; (b) registration by the proposed algorithm; (c) registration by scale-ICP algorithm; (d) registration by CPD algorithm; (e) registration by classic ICP algorithm
Fig. 7. Registration of spare part. (a) Pre-registration point cloud; (b) registration by the proposed algorithm; (c) registration by scale-ICP algorithm; (d) registration by CPD algorithm; (e) registration by classic ICP algorithm
Fig. 8. Point cloud of spare part. (a) Independent component feature graph of original point cloud; (b) independent component feature graph of unregistered point cloud
|
Table 1. Comparison of point cloud registrations with different algorithms
|
Table 2. Comparison of point cloud registrations after adding noise
|
Table 3. Comparison of point cloud registrations of spare part

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20