
Yue Jiang, Hongguang Huang, Qin Shu, Zhao Song, Zhirong Tang. Scale Point Cloud Registration Algorithm in High-Dimensional Orthogonal Subspace Mapping[J]. Acta Optica Sinica, 2019, 39(3): 0315007
- Acta Optica Sinica
- Vol. 39, Issue 3, 0315007 (2019)
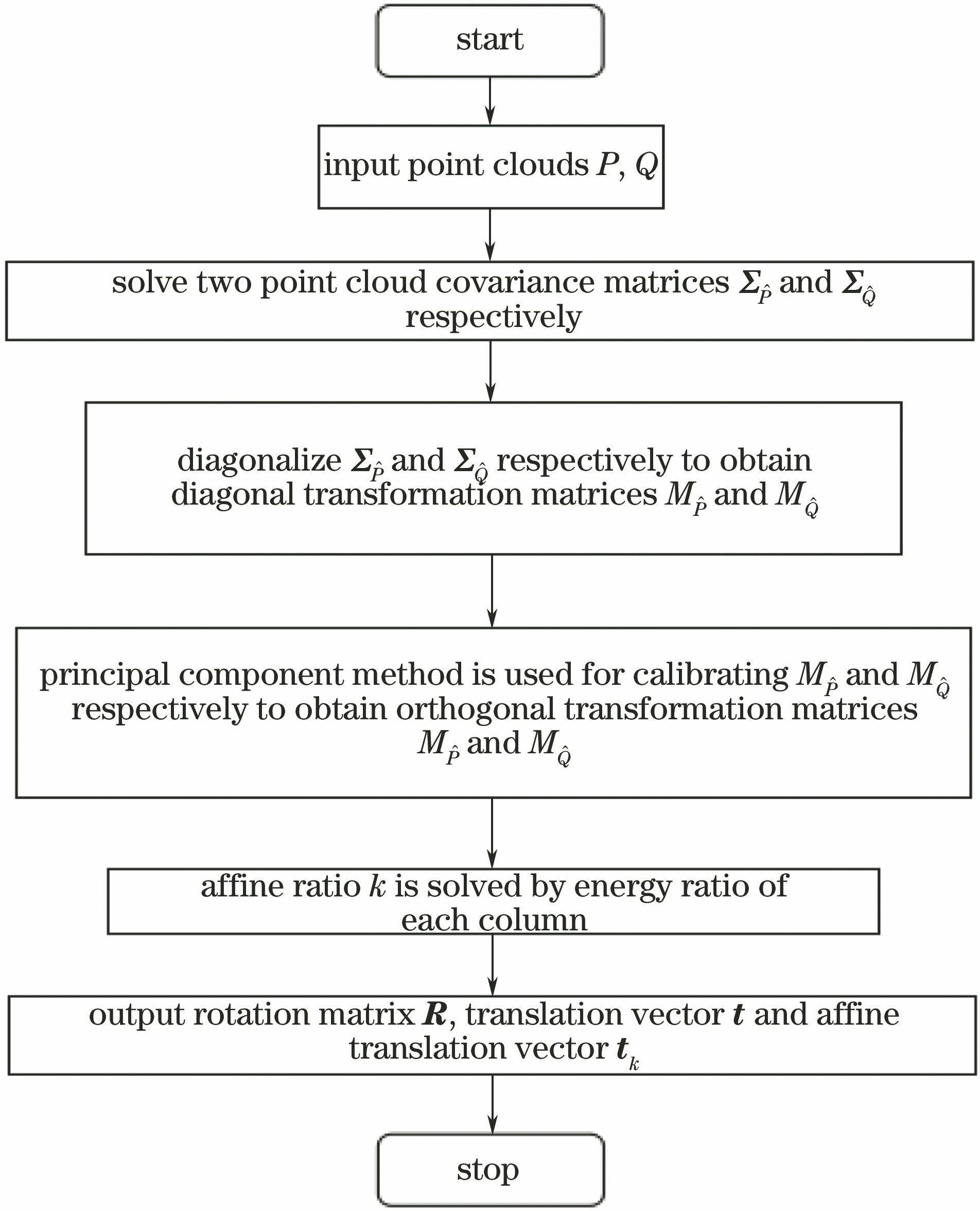
Fig. 1. Flow chart of algorithm
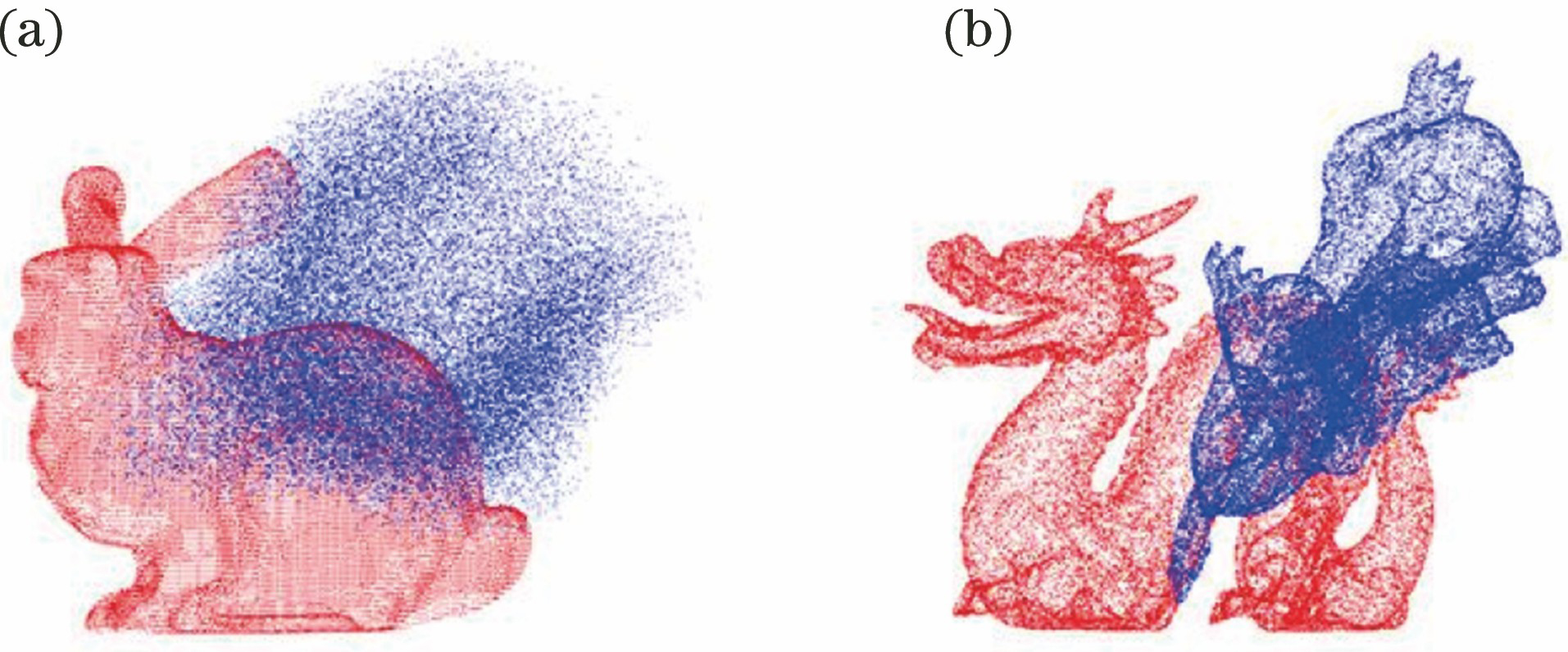
Fig. 2. Initial state of point cloud with noise and without data loss. (a) Bunny; (b) Dragon
Fig. 3. Registration results of Bunny obtained by different algorithms with noise and without data loss. (a) OrthS; (b) GA+ICP; (c) GA+Scale-ICP; (d) CPD; (e) Go-ICP
Fig. 4. Registration results of Dragon obtained by different algorithms with noise and without data loss. (a) OrthS; (b) GA+ICP; (c) GA+Scale-ICP; (d) CPD; (e) Go-ICP
Fig. 5. Registration results of large-scale Dragon by different algorithms with Gaussian white noise of 50 dB. (a) OrthS; (b) GA+ICP; (c) GA+Scale-ICP; (d) CPD; (e) Go-ICP
Fig. 6. Initial state of point cloud with noise and data loss. (a) Bunny; (b) Dragon
Fig. 7. Registration results of Bunny obtained by different algorithms with noise and data loss. (a) OrthS; (b) OrthS+ICP; (c) OrthS+Scale-ICP; (d) CPD; (e) Go-ICP
Fig. 8. Registration results of Dragon obtained by different algorithms with noise and data loss. (a) OrthS; (b) OrthS+ICP; (c) OrthS+Scale-ICP; (d) CPD; (e) Go-ICP
Fig. 9. Registration effects under different noise environments. (a) 25 dB; (b) 20 dB; (c) 15 dB; (d) 10 dB
Fig. 10. Registration results. (a) Root mean square error; (b) registration time
Fig. 11. Initial state of affine point cloud. (a) Bunny; (b) Dragon
Fig. 12. Registration results of affine point cloud. (a)(c) OrthS; (b)(d) Scale-ICP
Fig. 13. Two sets of physical maps. (a) Cylinder; (b) shower gel
Fig. 14. Registration results of cylinder. (a) Initial state; (b) OrthS; (c) OrthS+ICP; (d) OrthS+Scale-ICP; (e) CPD; (f) Go-ICP
Fig. 15. Registration results of shower gel. (a) Initial state; (b) OrthS; (c) OrthS+ICP; (d) OrthS+Scale-ICP; (e) CPD; (f) Go-ICP
| ||||||||||||||||||||||||||||||||||||||||
Table 1. Comparison of point cloud registration data with noise and without data loss
|
Table 2. Comparison of point cloud registration data with Gaussian white noise of 50 dB
| ||||||||||||||||||||||||||||||||||||||||
Table 3. Comparison of point cloud registration data with noise and data loss
| ||||||||||||||||||||||
Table 4. Comparison of registration data between two registration algorithms
| ||||||||||||||||||||||||||||||||||||||||
Table 5. Comparison of point cloud registration data

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20