
Fuqiang Zhou, Xin Chen, Haishu Tan, Xinghua Chai. Three-dimensional catadioptric vision sensor using omnidirectional dot matrix projection[J]. Chinese Optics Letters, 2016, 14(11): 111403
- Chinese Optics Letters
- Vol. 14, Issue 11, 111403 (2016)
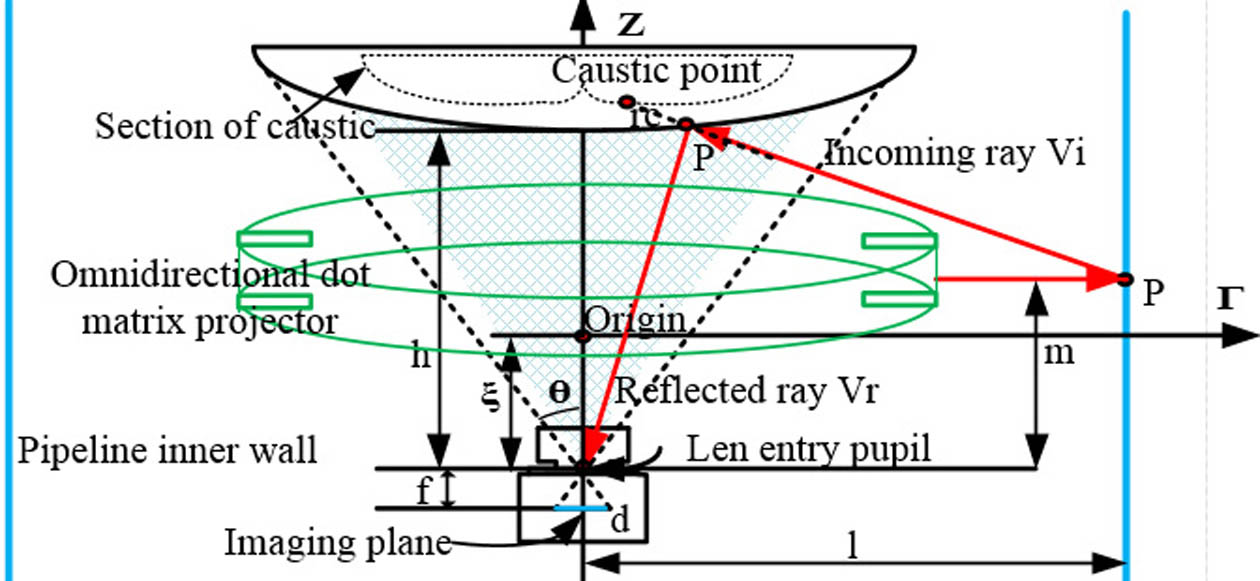
Fig. 1. Structure design of ODMP sensor.
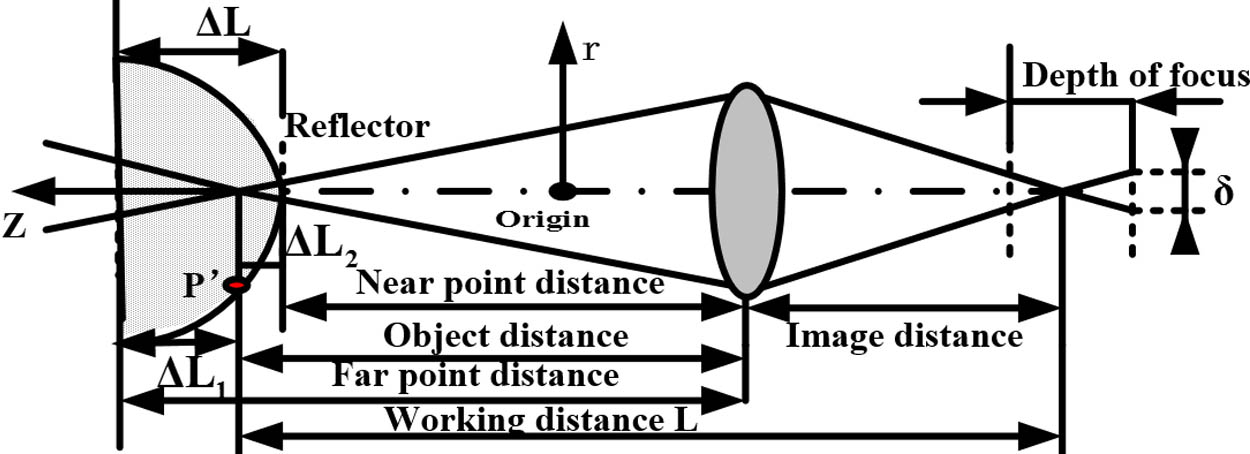
Fig. 2. Principle model of reflector designation.
Fig. 3. Resolution model of multi-dot-field local reconstruction sensor.
Fig. 4. Measurement model of multi-dot-field local reconstruction sensor.
Fig. 5. Resolution characteristics of the three reflectors.
Fig. 6. Shape of designed hyperbola reflector (ξ = 0
Fig. 7. Influence of angle of view field with resolution.
Fig. 8. Wavefront aberration of the reflector.
Fig. 9. Fraction of enclosed energy.
Fig. 10. MTF result of designed reflector.
Fig. 11. Measurement model of accuracy.
Fig. 12. Experimental image.
Fig. 13. Fitting calibration target in four place using 5 × 5
Fig. 14. RMS error with the change of ODMP.
Fig. 15. Compared measurement error in x y z
Fig. 16. Compared results in x y z 5 × 5
| ||||||||||||||||||||||||||
Table 1. Configuration of Multi-Dot-Field Local Reconstruction Sensor
|
Table 2. Configuration of Hyperbola Mirror

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20