
Qi Lu, Tingting Lin, Pengcheng Li, Ronghua Li, Yanjun Ge. Improved registration algorithm for spatial non-cooperative target point cloud clustering[J]. Infrared and Laser Engineering, 2021, 50(9): 20200431
- Infrared and Laser Engineering
- Vol. 50, Issue 9, 20200431 (2021)
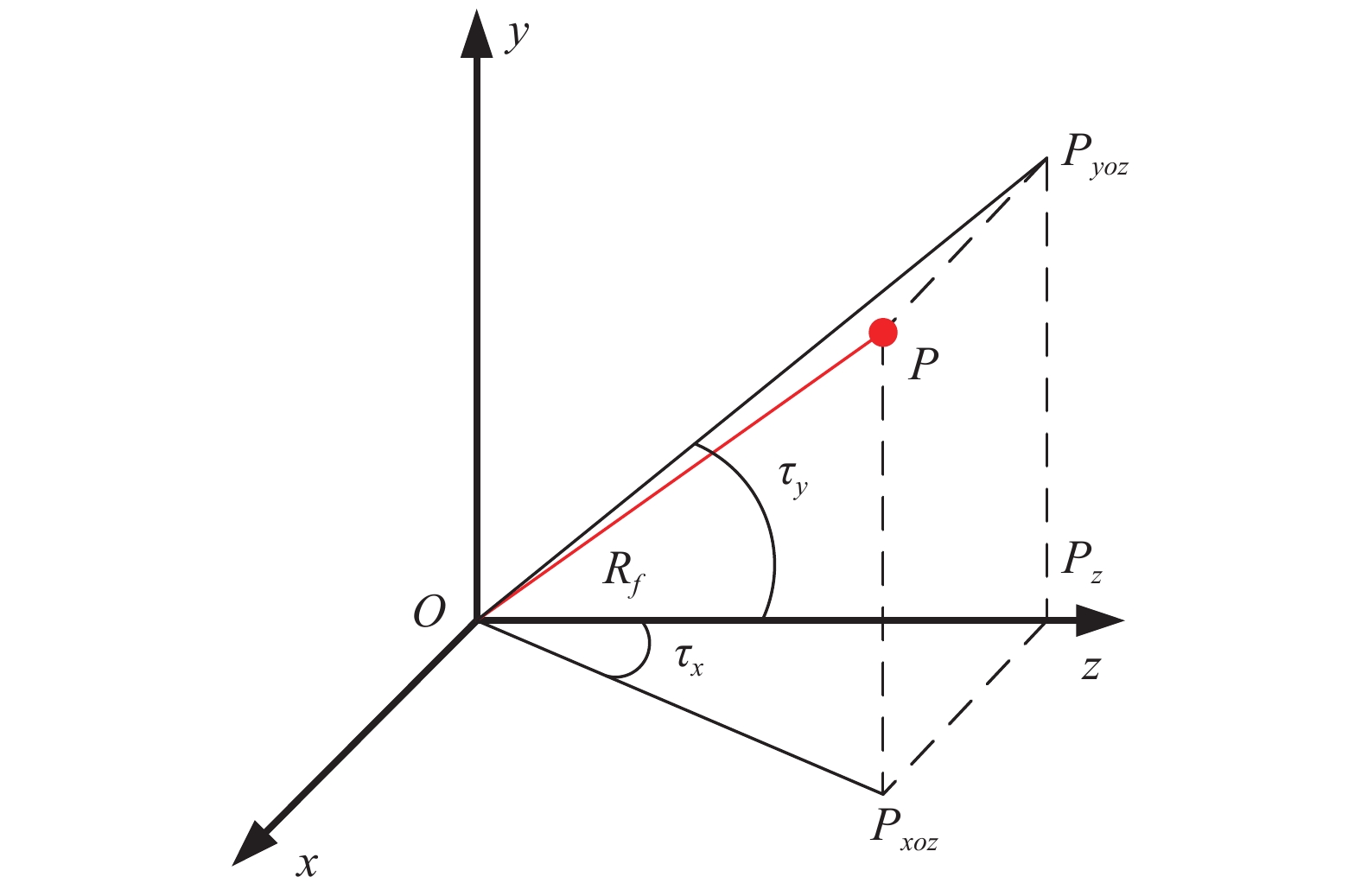
Fig. 1. Positional relationship of measurable points in radar coordinate system
Fig. 2. Spatial non-cooperative target simulation visual point cloud
Fig. 3. Regional growth clustering results
Fig. 4. Color visual point cloud
Fig. 5. Boundary extraction result
Fig. 6. Clustering results of the proposed algorithm
Fig. 7. Small-scale distinctive feature point cloud
Fig. 8. Pitch angle registration error
Fig. 9. Yaw angle registration error
Fig. 10. Roll angle registration error
Fig. 11. Algorithm consumes time
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Registration results of proposed algorithm
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Registration results of ICP algorithm
|
Table 3. Algorithm time-consuming comparison
| ||||||||||||||||||||||||||||||
Table 4. Registration cumulative error statistics

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20