
Xiaopeng Xie, Yongdong Ou, Yin'an Wang, Zeqiong Huang. Stereo Matching Algorithm Based on Fusion Cost and Segmentation Optimization[J]. Laser & Optoelectronics Progress, 2021, 58(12): 1215004
- Laser & Optoelectronics Progress
- Vol. 58, Issue 12, 1215004 (2021)
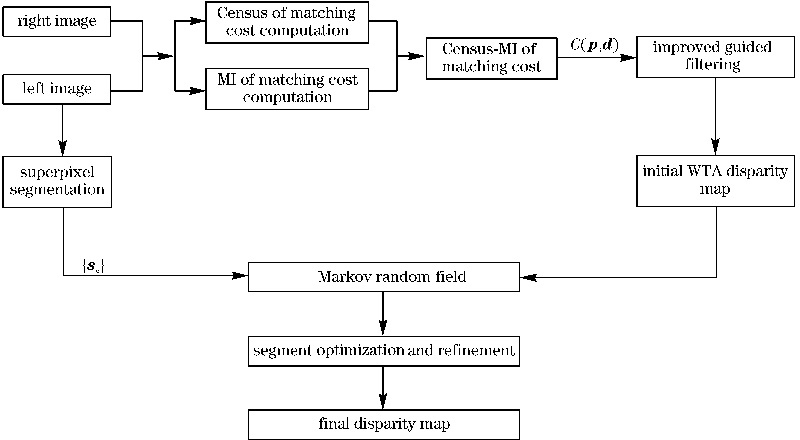
Fig. 1. Flowchart of the proposed algorithm
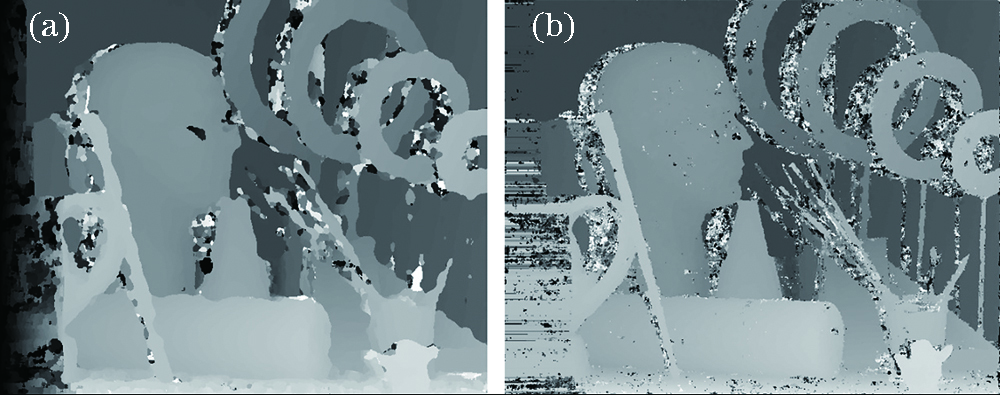
Fig. 2. Initial disparity map before and after the adaptive weighting improvement. (a) Before adaptive weight improvement; (b) after adaptive weight improvement
Fig. 3. Disparity maps of each stage. (a) ArtL original image; (b) initial disparity map obtained by fusion cost of Census transformation and MI and improved guided filter aggregation; (c) disparity map optimized by MRF; (d) final disparity map obtained after segmentation optimization and median filtering
Fig. 4. Influence of ρ on the disparity map. (a) Influence of ρ on all area of the disparity map; (b) influence of ρ on the non-occlusion area of the disparity map
Fig. 5. Influence of k on the disparity map. (a) Influence of k on the non-occlusion area of the disparity map; (b) influence of k on all area of the disparity map
Fig. 6. Influence of k on the running time of each optimization stage
Fig. 7. Initial disparity map and optimized disparity map. (a) Initial disparity map; (b) color initial disparity map; (c) disparity map optimized by the proposed algorithm; (d) color disparity map optimized by the proposed algorithm
|
Table 1. Experimental related parameter settings
|
Table 2. Influence of k on the average processing time of the images
|
Table 3. Disparity average error of non-occluded pixel points obtained by different algorithms unit: %

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20