
Yi Chen, Haima Yang, Jin Liu, Jun Li, Zihao Yu, Jun Pan, Ji Xia. Point-Cloud Splicing Algorithm for Collaborative Matching of Two-Dimensional Cross Feature Points[J]. Laser & Optoelectronics Progress, 2021, 58(2): 0210003
- Laser & Optoelectronics Progress
- Vol. 58, Issue 2, 0210003 (2021)
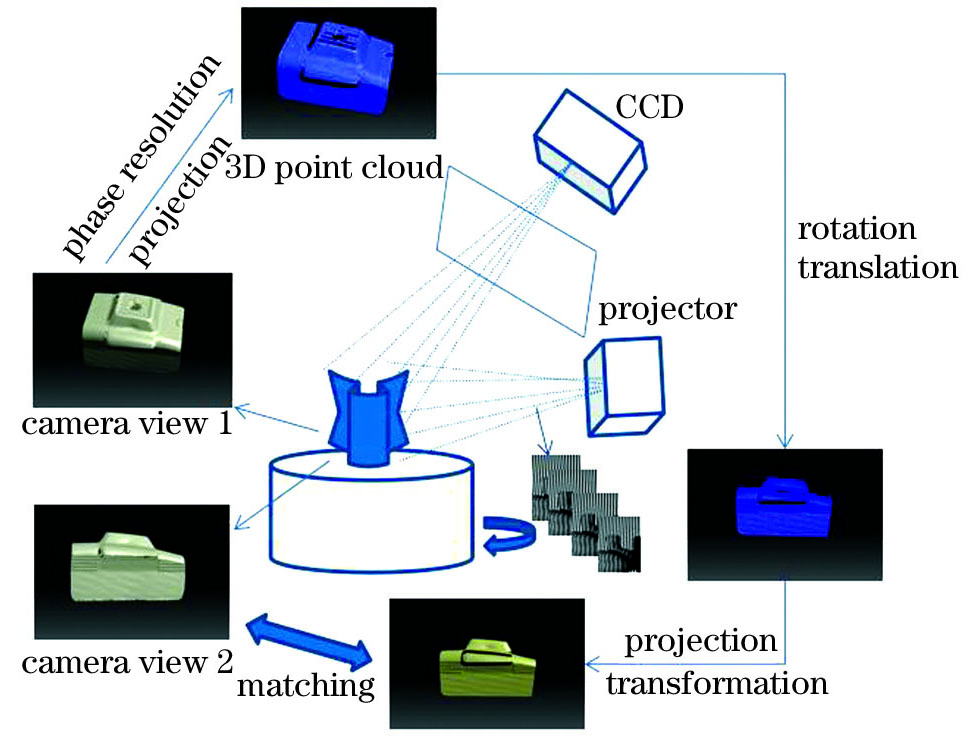
Fig. 1. 2D image normalization process based on turntable assistance
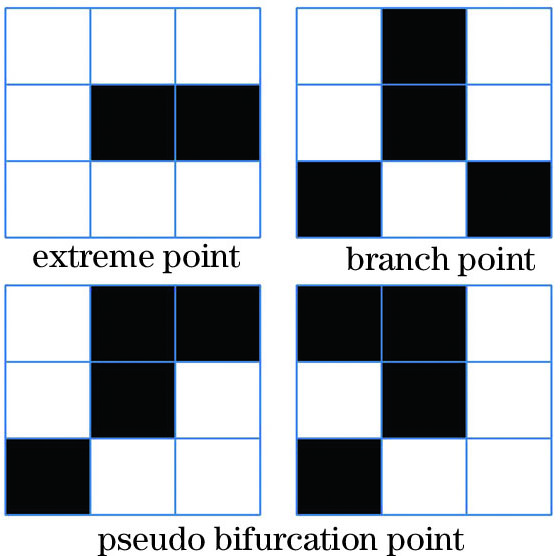
Fig. 2. Eight neighborhood distribution of key points
Fig. 3. Feature point matching of 2D image
Fig. 4. Feature point description of point clouds
Fig. 5. 3D scanning platform and software system
Fig. 6. Distance error of adjacent point pairs on calibration plate
Fig. 7. Normalization and preprocessing of 2D images. (a) (b) 2D graphs with different perspectives; (c) image after translational rotation transformation for mapped spatial point clouds of Fig. 7 (a); (d) 2D image obtained by perspective projection transformation of Fig. 7 (c); (e) (f) preprocessed images
Fig. 8. Extraction of feature points. (a) Algorithm of this paper; (b) SIFT algorithm
Fig. 9. Matching of feature points. (a) SIFT; (b) ASIFT; (c) normalization+SIFT; (d) algorithm of this paper
Fig. 10. Collaborative matching results of dual-dimensional feature points. (a) Space posture 1; (b) space posture 2
Fig. 11. Sculpture model splicing. (a) 2D matching; (b) 3D matching; (c) coarse splicing; (d) fine splicing
Fig. 12. Iterations-error curves of traditional and improved ICP algorithms under different noise. (a) Noise of 0.1dB,improved ICP algorithm;(b) noise of 0.5dB, improved ICP algorithm; (c) noise of 0.1dB, traditional ICP algorithm; (d) noise of 0.5dB, traditional ICP algorithm
Fig. 13. Results of partial and integral fine splicing. (a)--(d) Partial fine splicing; (e) (f) overall fine splicing
|
Table 1. Statistics of matching effect of algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20