
Kexun Chen, Deng'ao Li, Wei Qiu. Design and verification of multi-mode GNSS pseudo-range combined positioning method[J]. Infrared and Laser Engineering, 2021, 50(6): 2021G006
- Infrared and Laser Engineering
- Vol. 50, Issue 6, 2021G006 (2021)
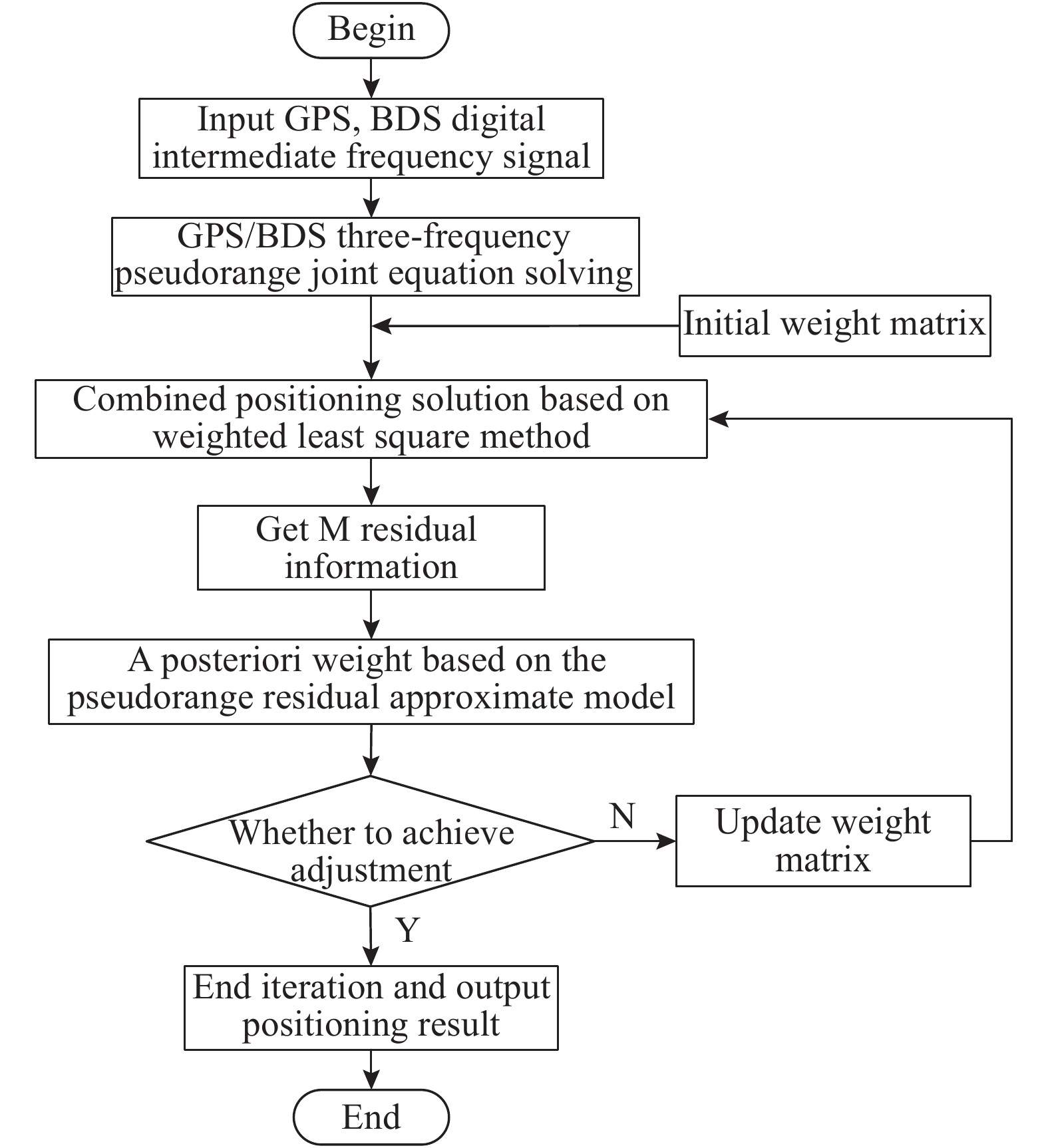
Fig. 1. Schematic diagram of iterative combined positioning algorithm
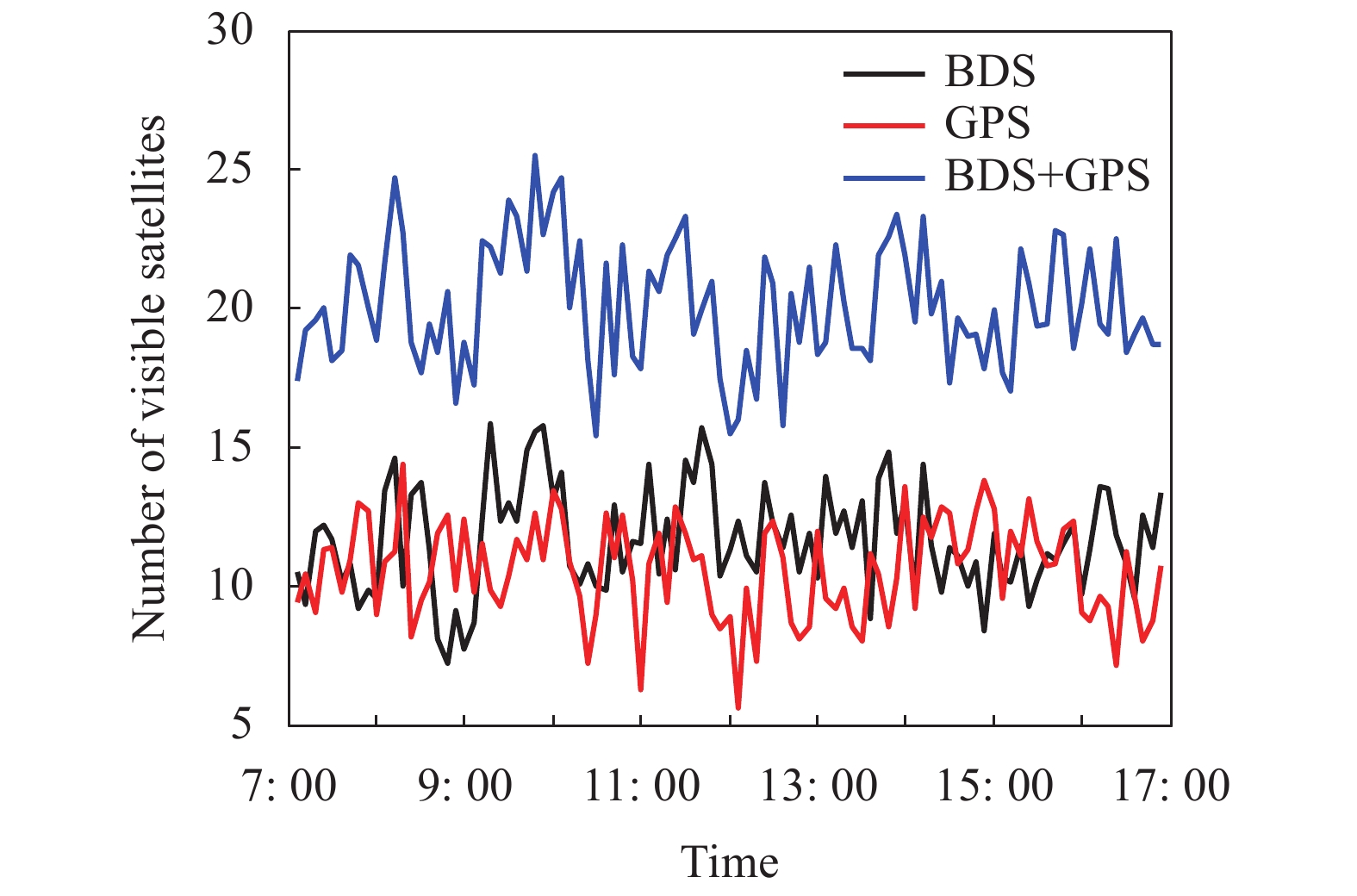
Fig. 2. Comparison of the visible satellites number between single-mode and dual-mode GNSS receiver
Fig. 3. Comparison of PDOP value between single-mode and dual-mode GNSS receiver
Fig. 4. Positioning error comparison diagram of the X direction
Fig. 5. Positioning error comparison diagram of the Y direction
Fig. 6. Positioning error comparison diagram of the Z direction
Fig. 7. Comparison of the proposed algorithm and the public software GrafNav
Fig. 8. Error diagram of GPS/BDS pseudorange combination positioning
Fig. 9. Scatter diagram of GPS/BDS pseudorange combination positioning
|
Table 1. Precision comparison of the traditional algorithm and the proposed algorithm
| ||||||||||||||||||||
Table 2. Precision comparison of the traditional algorithm and the proposed algorithm


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20