
Pengfei Jia, Quanzhou Liu, Kai Peng, Zhanqi Li, Qipei Wang, Yiding Hua. Front vehicle detection based on multi-sensor information fusion[J]. Infrared and Laser Engineering, 2022, 51(6): 20210446
- Infrared and Laser Engineering
- Vol. 51, Issue 6, 20210446 (2022)
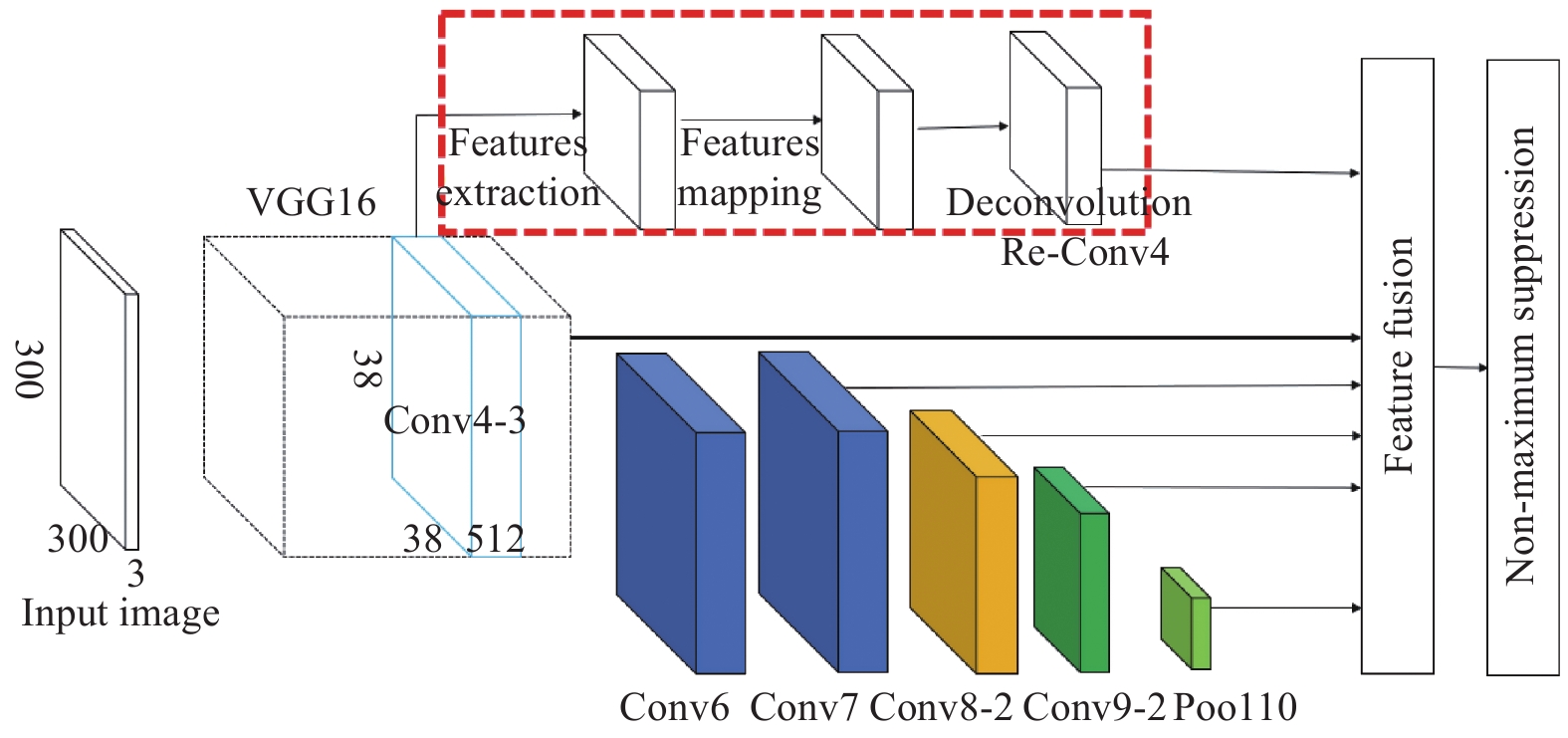
Fig. 1. Network structure diagram of improved SSD algorithm
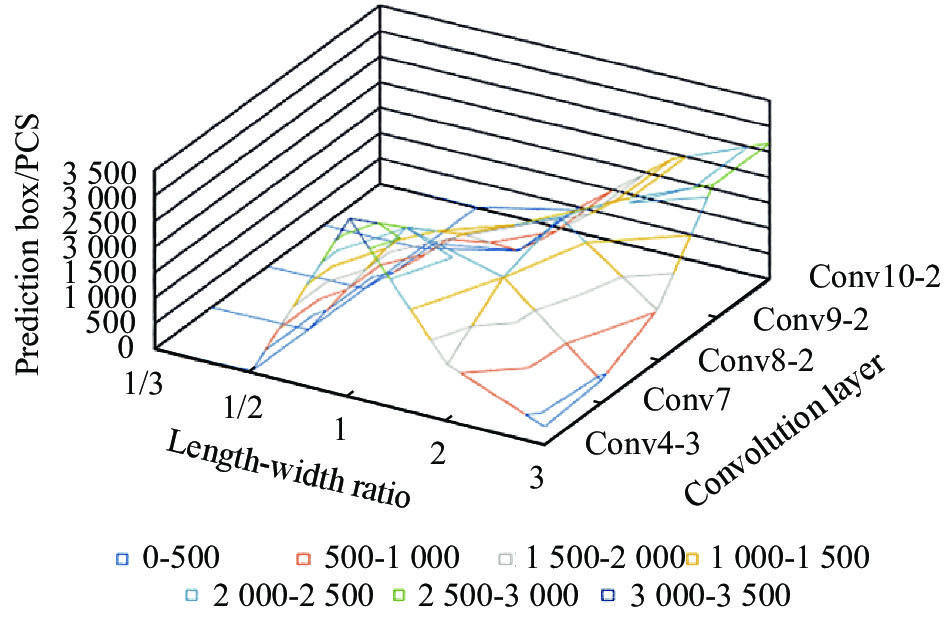
Fig. 2. Scale distribution graph of candidate boxes
Fig. 3. (a) Long focal length image; (b) Short focal length image; (c) Image with fusion processed; (d) Partial image without fusion processing; (e) Partial image with fusion processed
Fig. 4. (a) Collected vehicle pictures; (b) Improved SSD algorithm for vehicle detection result in complex environment
Fig. 5. (a) Radar detection results in dynamic target simulation; (b) Influence of Lifetime parameters on radar detection results
Fig. 6. Installation location of camera and radar on real vehicle
Fig. 7. (a) Experimental picture; (b) Data collection
Fig. 8. (a) Data interaction between camera and radar;(b) Vehicle test results
|
Table 1. Image residuals and overall errors of calibration results
|
Table 2. Comparison table of vehicle detection accuracy

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20