
Lihui Liu, Bitao Tan, Canji Mai. Structural Parameter Design and Performance Simulation of 241-Element Deformable Mirror[J]. Laser & Optoelectronics Progress, 2019, 56(9): 090101
- Laser & Optoelectronics Progress
- Vol. 56, Issue 9, 090101 (2019)
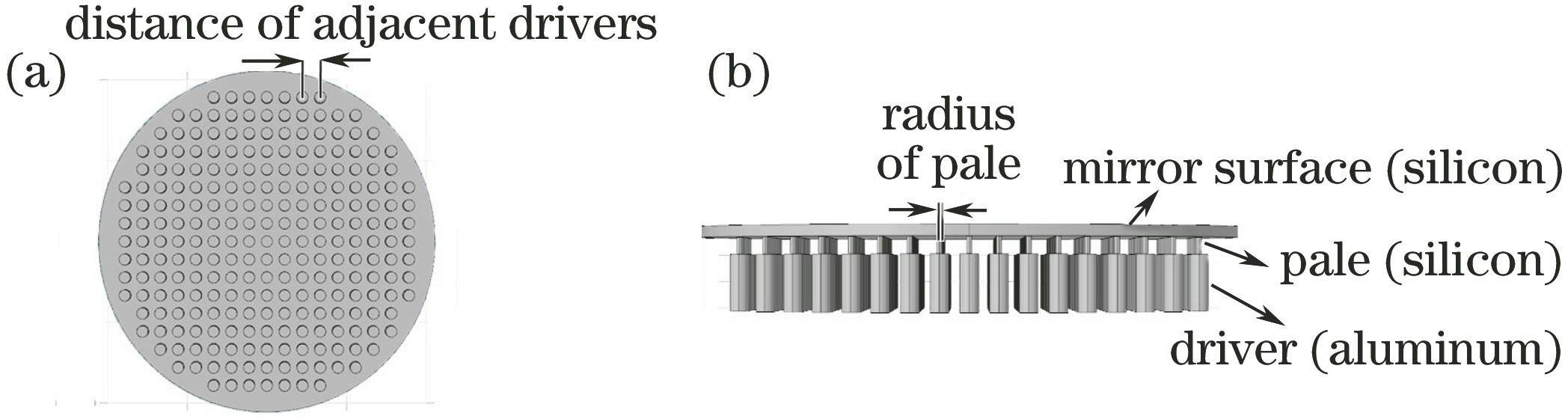
Fig. 1. Structural diagram of model of 241-element deformable mirror. (a) Back; (b) side
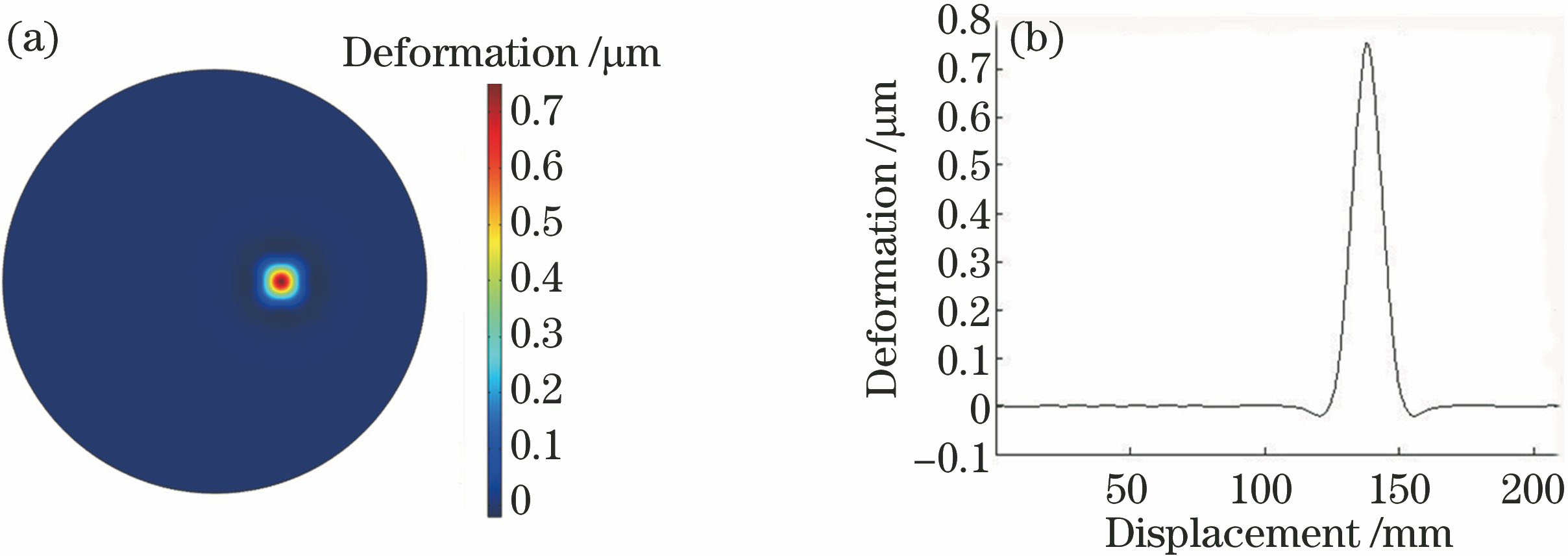
Fig. 2. Influence function of driver. (a) Surface of influence function; (b) curve of influence function
Fig. 3. Relationship among laser facula, sub-aperture and driver of sensor. (a) Laser facula; (b) alignment of sub-facula, sub-aperture, and drivers
Fig. 4. Process of simulation and calculation
Fig. 5. RMS value of residual fitting error of Zernike polynomial when distance of adjacent drivers is 9 mm. (a) Range of r is 1-3 mm; (b) range of r is 1-2 mm
Fig. 6. RMS value of residual fitting error of Zernike polynomial when distance of adjacent drivers is 10 mm. (a) Range of r is 1-3 mm; (b) range of r is 1-2 mm
Fig. 7. RMS value of residual fitting error of Zernike polynomial when distance of adjacent drivers is 11 mm. (a) Range of r is 1-3 mm; (b) range of r is 1-2 mm
Fig. 8. RMS value of residual fitting error of Zernike polynomial when radius of pale is 1 mm. (a) Range of d is 8-12 mm; (b) range of d is 10-12 mm
Fig. 9. RMS value of residual fitting error of Zernike polynomial when radius of pale is 1.5 mm. (a) Range of d is 8-12 mm; (b) range of d is 10-12 mm
Fig. 10. RMS value of residual fitting error of Zernike polynomial when radius of pale is 1-1.5 mm and distance of adjacent drivers is 9.5-10.5 mm. (a) Curves when distance of 9.5 mm is not deleted; (b) curves when distance of 9.5 mm is deleted
Fig. 11. Calculated curve of coupling factor of deformable mirror
Fig. 12. RMS value of residual fitting error of Zernike polynomial under different translation errors. (a) Translation error is 0-10 mm; (b) translation error is 0-4 mm
Fig. 13. RMS value of residual fitting error of Zernike polynomial when horizontal and vertical translation errors coexist. (a) Translation error is 0-10 mm; (b) translation error is 0-4 mm
Fig. 14. RMS value of residual fitting error of Zernike polynomial under different rotation errors. (a) Rotation error is 0°-10°; (b) rotation error is 0°-6°

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20