
Zheng Xunjiang, He Feng, Jiang Lihui, Cao Weiwei, Xiao Dongdong. Research on autonomous optical navigation algorithm for Mars exploration during the surround segment(Invited)[J]. Infrared and Laser Engineering, 2020, 49(5): 20190458
- Infrared and Laser Engineering
- Vol. 49, Issue 5, 20190458 (2020)
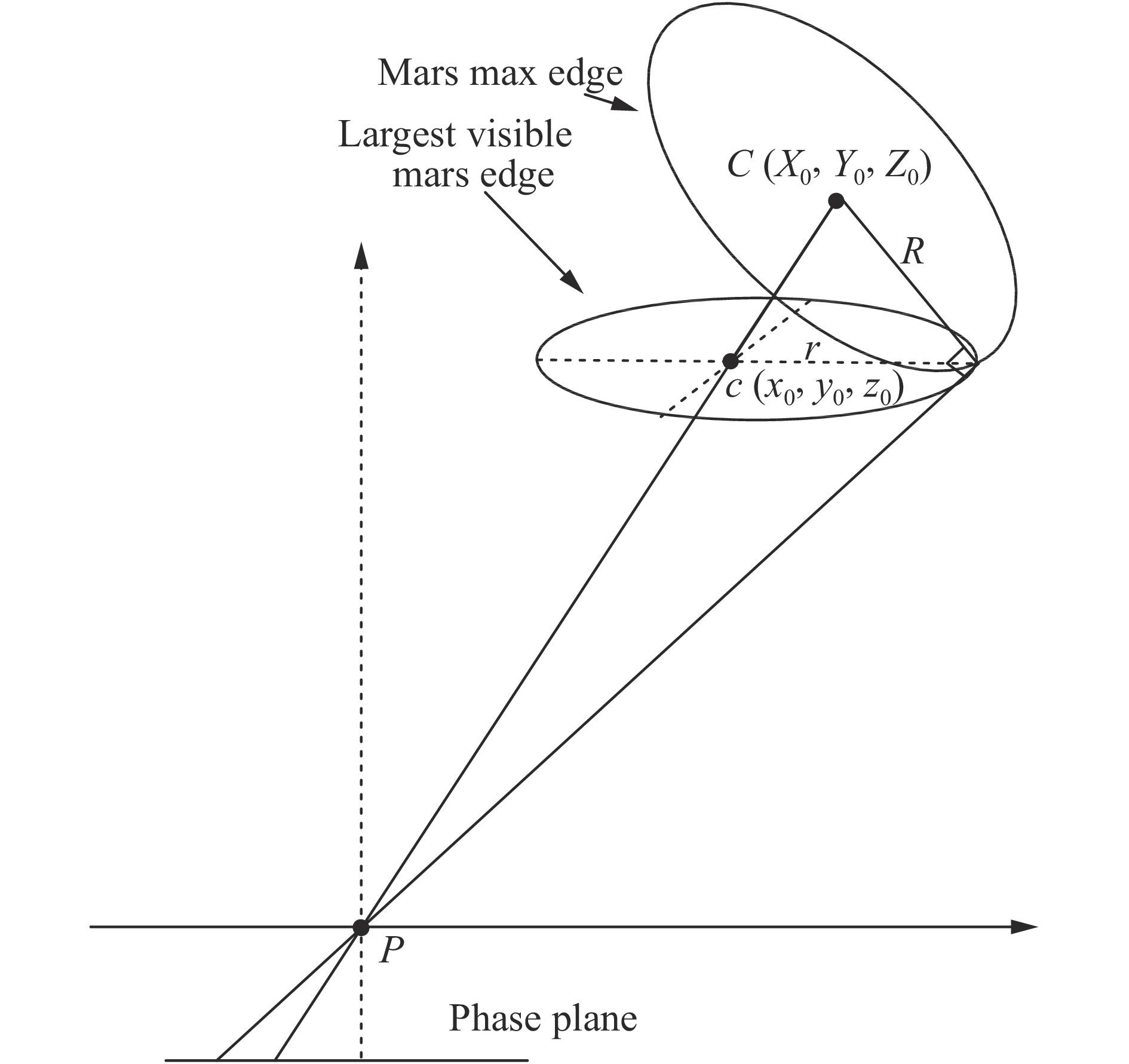
Fig. 1. Camera imaging geometry
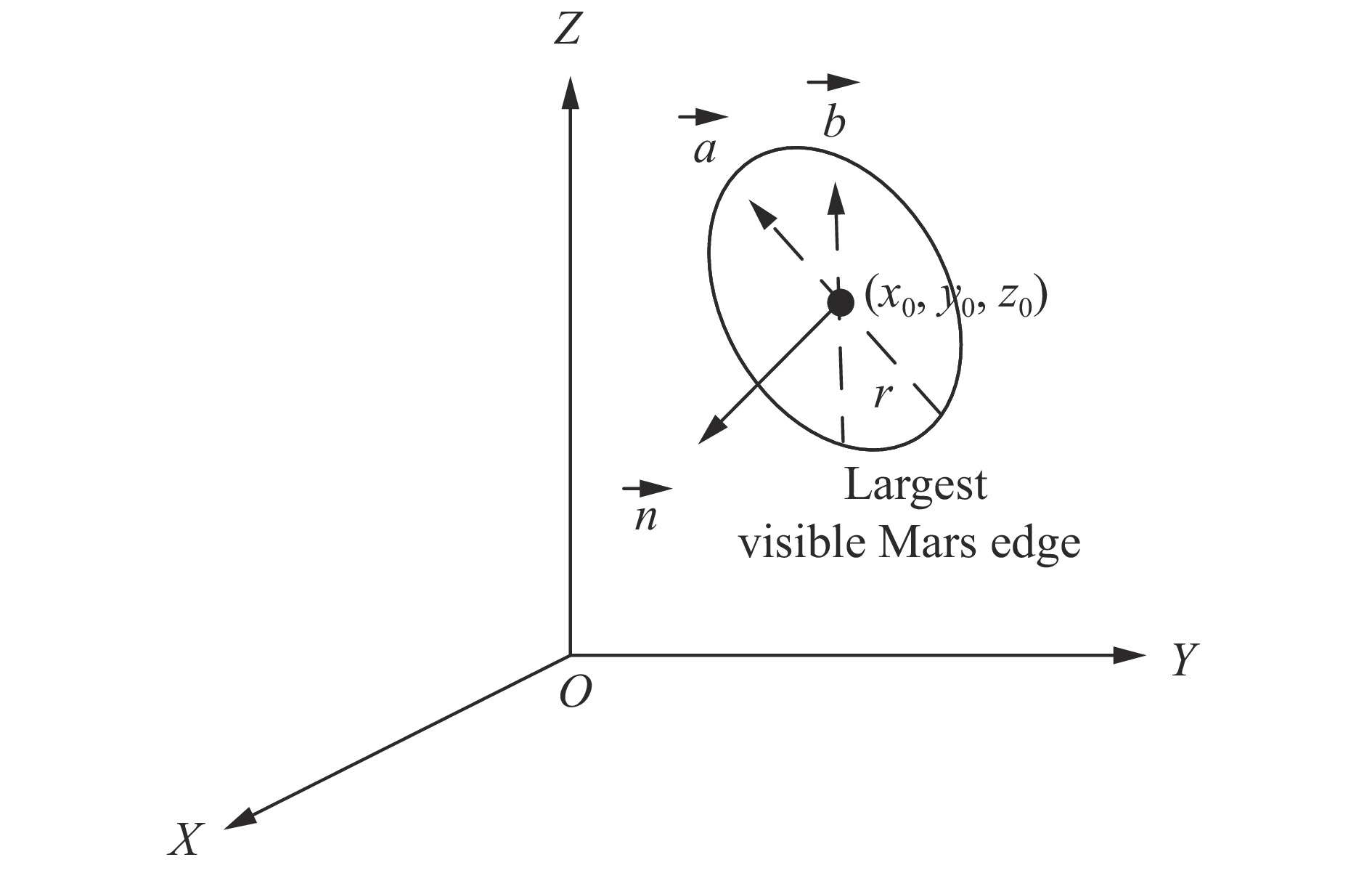
Fig. 2. Circle in 3-D space
Fig. 3. Schematic diagram of simulated imaging results
Fig. 4. Analog point cloud map and nominal arc point cloud map
Fig. 5. Matching results of nominal arc and simulated imaging arc
Fig. 6. Taking point diagram
Fig. 7. Least squares ellipse fitting result
Fig. 8. Mars center in the phase plane projection geometric relationship
Fig. 9. Centroid vector pitch angle error standard deviation
Fig. 10. Centroid vector yaw angle error standard deviation
Fig. 11. Effect of different points on the centroid vector
Fig. 12. Effect of different offsets on the centroid vector
Fig. 13. Effect of rotation on the centroid vector solution
Fig. 14. Effect of translation on the centroid vector solution
Fig. 15. Effect of size transformation on the centroid vector solution


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20