
Yang Yu, Honggang Zhang, Junke Gao, Jiangang Wang. Friction observation compensation technology based on angular position information of photoelectric platform[J]. Infrared and Laser Engineering, 2022, 51(5): 20210557
- Infrared and Laser Engineering
- Vol. 51, Issue 5, 20210557 (2022)
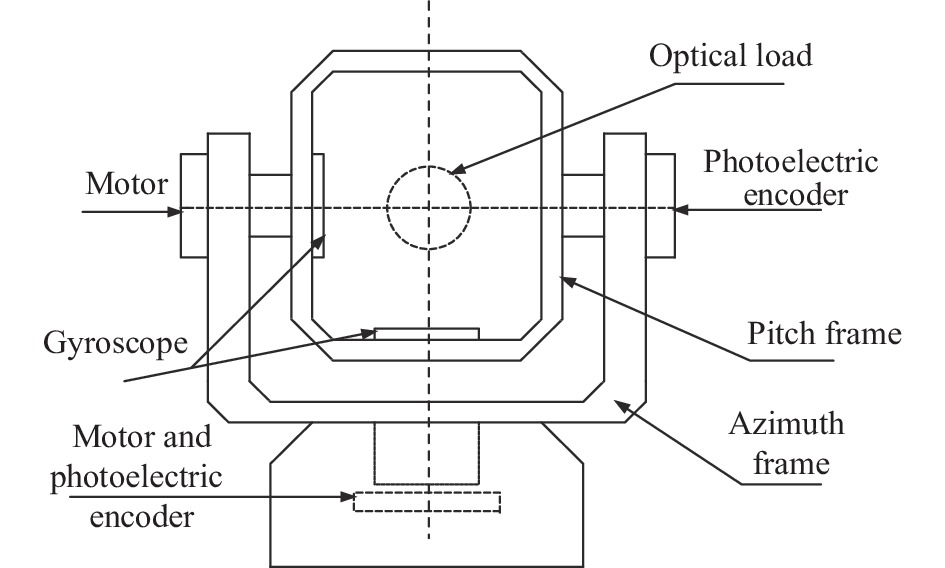
Fig. 1. Structure diagram of photoelectric stabilization platform
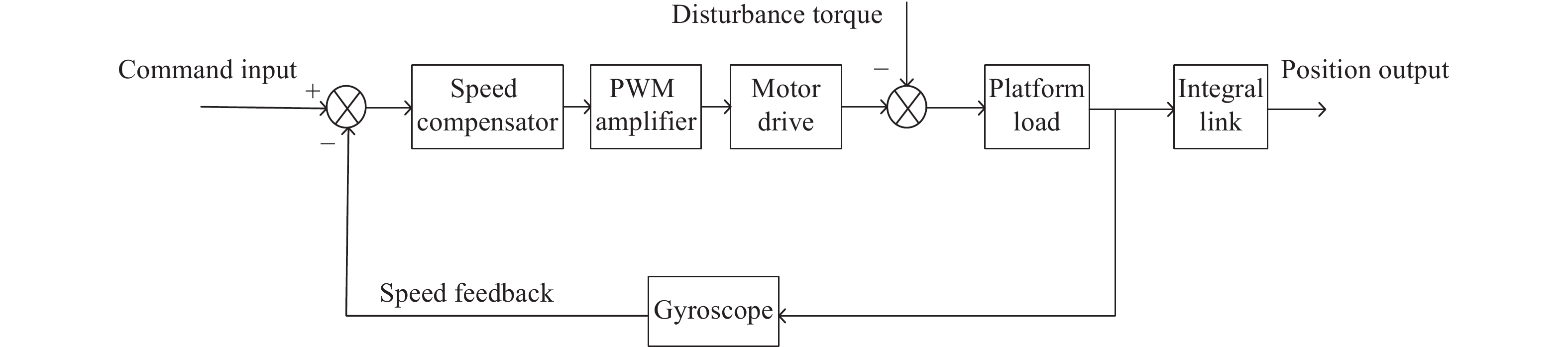
Fig. 2. Single axis loop control block diagram of photoelectric stabilization platform
Fig. 3. Acceleration compensation block diagram of stabilized platform
Fig. 4. Schematic diagram of sensor tracking mechanism movement position
Fig. 5. Observer model
Fig. 6. Precision rendering of acceleration estimation
Fig. 7. Load speed response diagram before and after compensation when 10 Hz,0.03° disturbance is applied
Fig. 8. Image stabilization accuracy of the platform before and after friction compensation when 10 Hz,0.03° disturbance signal is input
|
Table 1. Parameter selection of platform
|
Table 2. Parameter selection of LuGre friction model
|
Table 3. Main technical specifications of STM210 gyro
|
Table 4. Main technical specifications of DS-130 photoelectric encoder


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20