
Yongjie Ren, Xian Zhao, Siyang Guo, Jinwang Wang, Jun Deng. Path Planning Control of Automated Guided Vehicle Based on Workshop Measurement Positioning System and Fuzzy Control[J]. Acta Optica Sinica, 2019, 39(3): 0312003
- Acta Optica Sinica
- Vol. 39, Issue 3, 0312003 (2019)
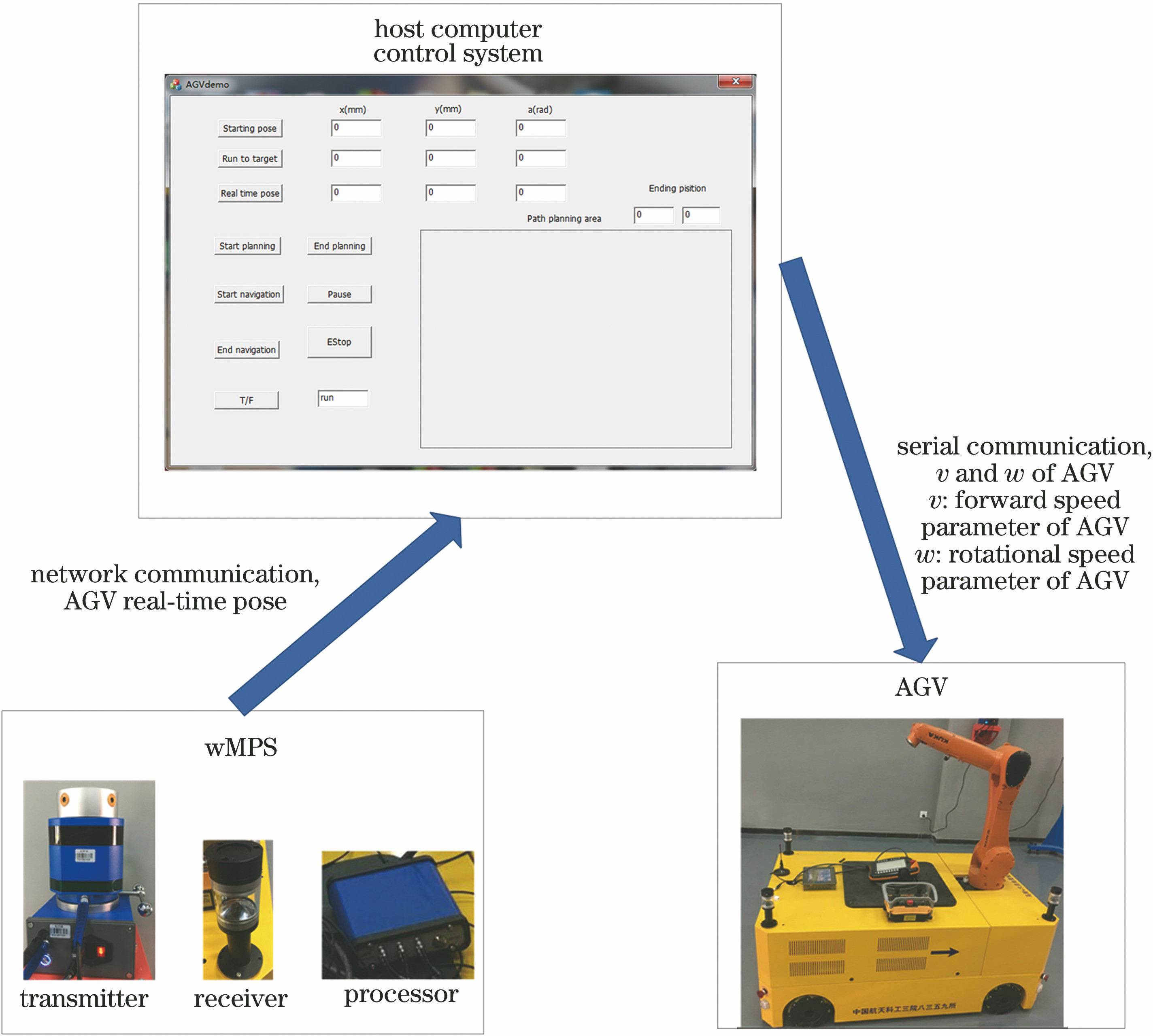
Fig. 1. Constitutions of AGV path planning system
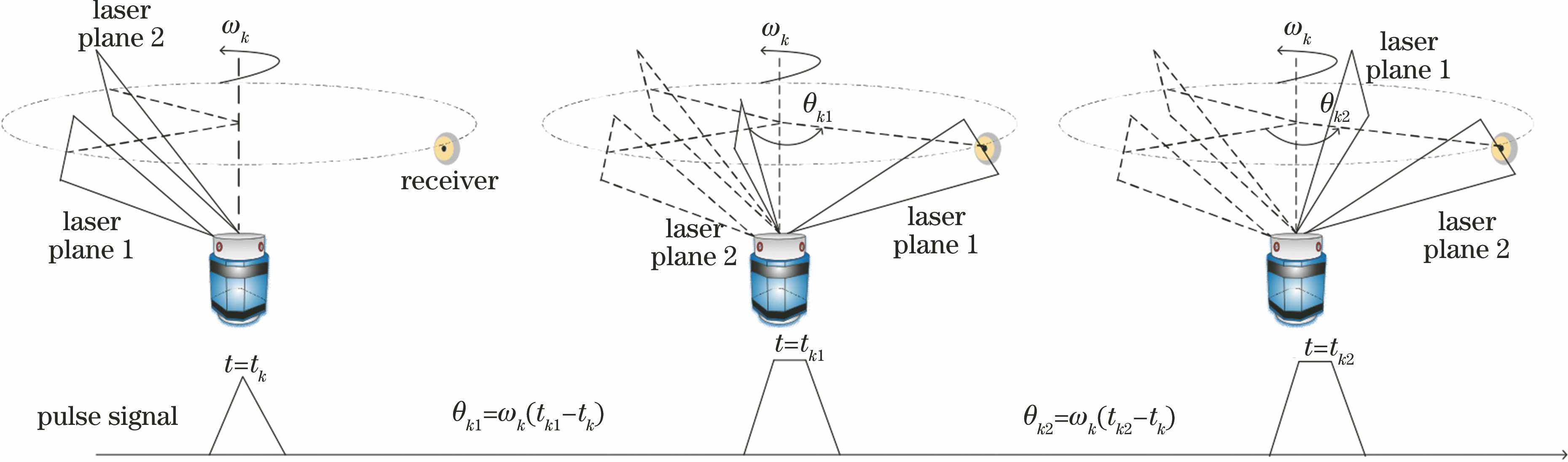
Fig. 2. Transmitter measurement principle
Fig. 3. Flow chart of AGV path planning
Fig. 4. AGV motion model
Fig. 5. Membership function of d
Fig. 6. Membership function of v
Fig. 7. Membership function of β
Fig. 8. Membership function of w
Fig. 9. Simulation trajectory
Fig. 10. Simulation deviation analysis
Fig. 11. Experimental environment and experimental device
Fig. 12. Experimental trajectory
Fig. 13. Real-time deflection angle
Fig. 14. Experimental trajectory for complex path
|
Table 1. Expected and actual value of first target point
|
Table 2. Expected and actual value of second target point

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20