
Baoyi Ge, Xianzhang Zuo, Yongjiang Hu. Long-Term Object Tracking Based On Feature Fusion[J]. Acta Optica Sinica, 2018, 38(11): 1115002
- Acta Optica Sinica
- Vol. 38, Issue 11, 1115002 (2018)
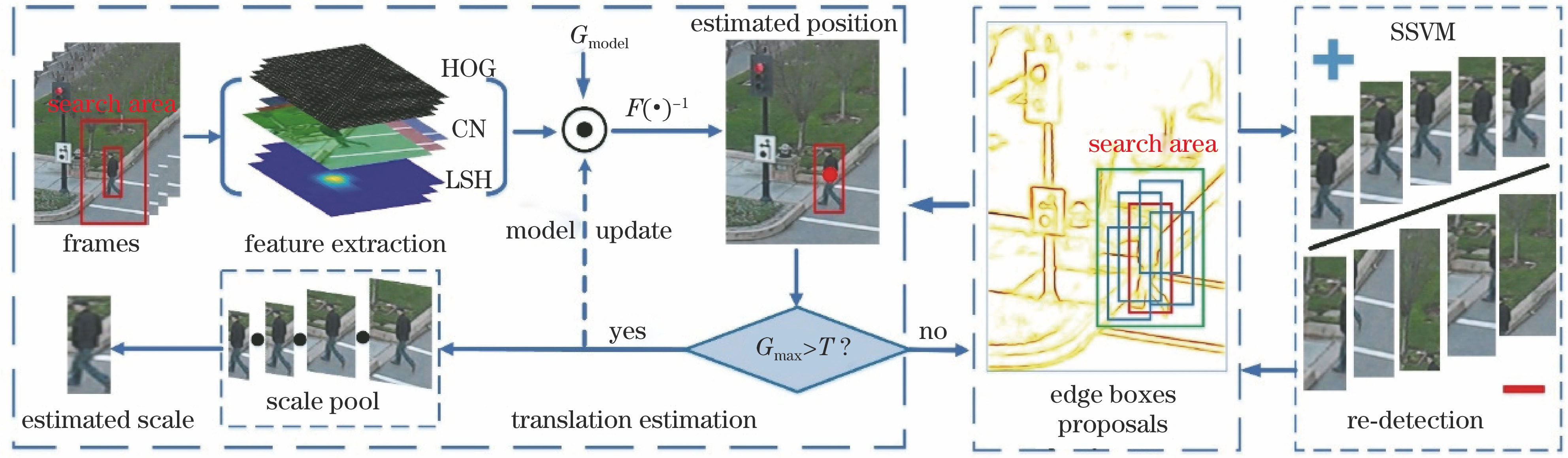
Fig. 1. Framework of proposed tracking algorithm
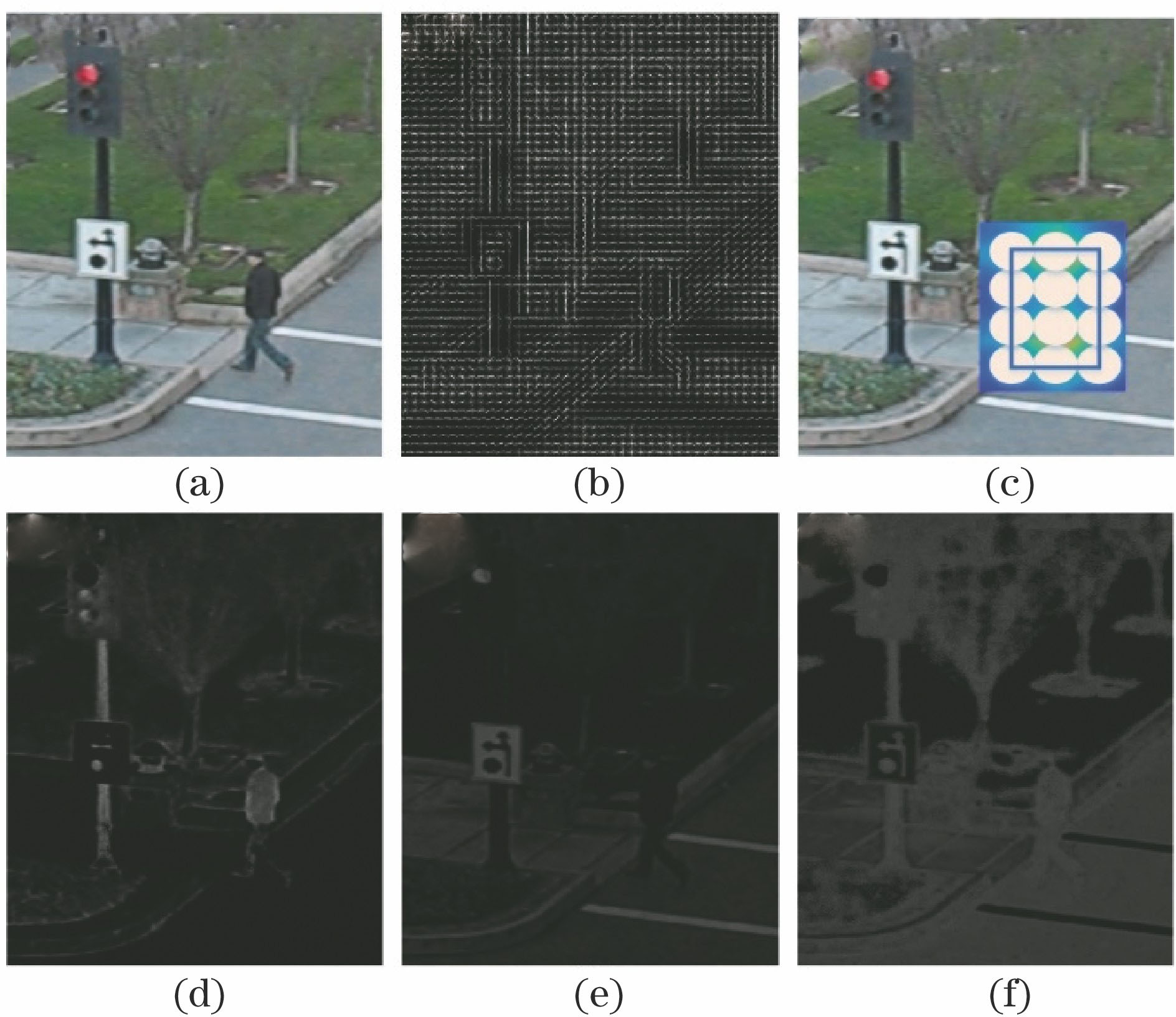
Fig. 2. Object feature visualization. (a) Image; (b) HOG; (c) LSH; (d)-(f) CN
Fig. 3. Region proposal
Fig. 4. Flow chart of proposed algorithm
Fig. 5. Tracking results of different target detection threshold
Fig. 6. Tracking results evaluation plots on OTB100
Fig. 7. Partial object tracking results and overlap rates on OTB100. (a) Panda; (b) Lemming; (c) Blur Owl; (d) Human5; (e) Soccer; (f) Wake board1; (g) Jogging-2
Fig. 8. OPE evaluation on UAV123. (a) Precision; (b) success rate
Fig. 9. Tracking results in practical applications. (a) Bicycle; (b) child; (c) girl
|
Table 1. Success rate of object tracking
|
Table 2. Characteristics of image sequences in experiment
|
Table 3. Success rate of object tracking

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20