
Yidong Liu, Zhentang Jia. Improved Calibration Method of Camera Internal Parameters Based on Nonlinear Optimization[J]. Laser & Optoelectronics Progress, 2022, 59(18): 1815014
- Laser & Optoelectronics Progress
- Vol. 59, Issue 18, 1815014 (2022)

Fig. 1. Main flow of camera calibration
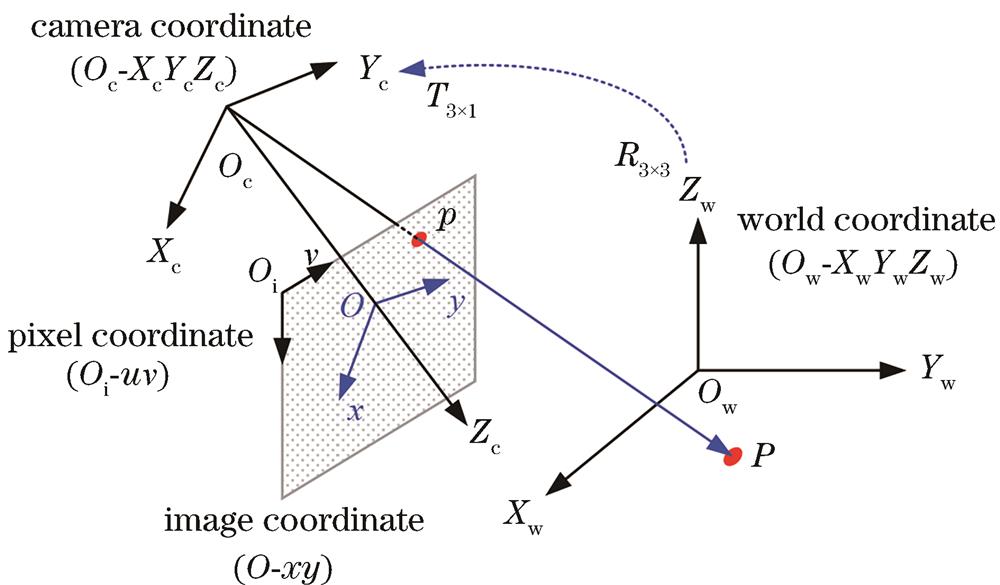
Fig. 2. Coordinate transformation of camera imaging
Fig. 3. Improved calibration process of camera
Fig. 4. Calibration images at different positions
Fig. 5. Calibration image after corner extraction
Fig. 6. Optimization results of two PSO algorithms
Fig. 7. Position relationship between actual corner and reprojection corner
Fig. 8. Reprojection error of different calibration methods. (a) Calibration toolbox; (b) Zhang calibration method; (c) proposed method
Fig. 9. Search performance comparison of four intelligent optimization algorithms
|
Table 1. Linear solution of camera internal parameters
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Results of PSO with different iterations
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Results of DWAMPSO with different iterations
|
Table 4. Fitness results of different algorithms
|
Table 5. Convergence rate of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20