
Qishu Qian, Yihua Hu, Nanxiang Zhao, Minle Li, Fucai Shao. Object Tracking Algorithm Based on Global Feature Matching Processing of Laser Point Cloud[J]. Laser & Optoelectronics Progress, 2020, 57(6): 061012
- Laser & Optoelectronics Progress
- Vol. 57, Issue 6, 061012 (2020)
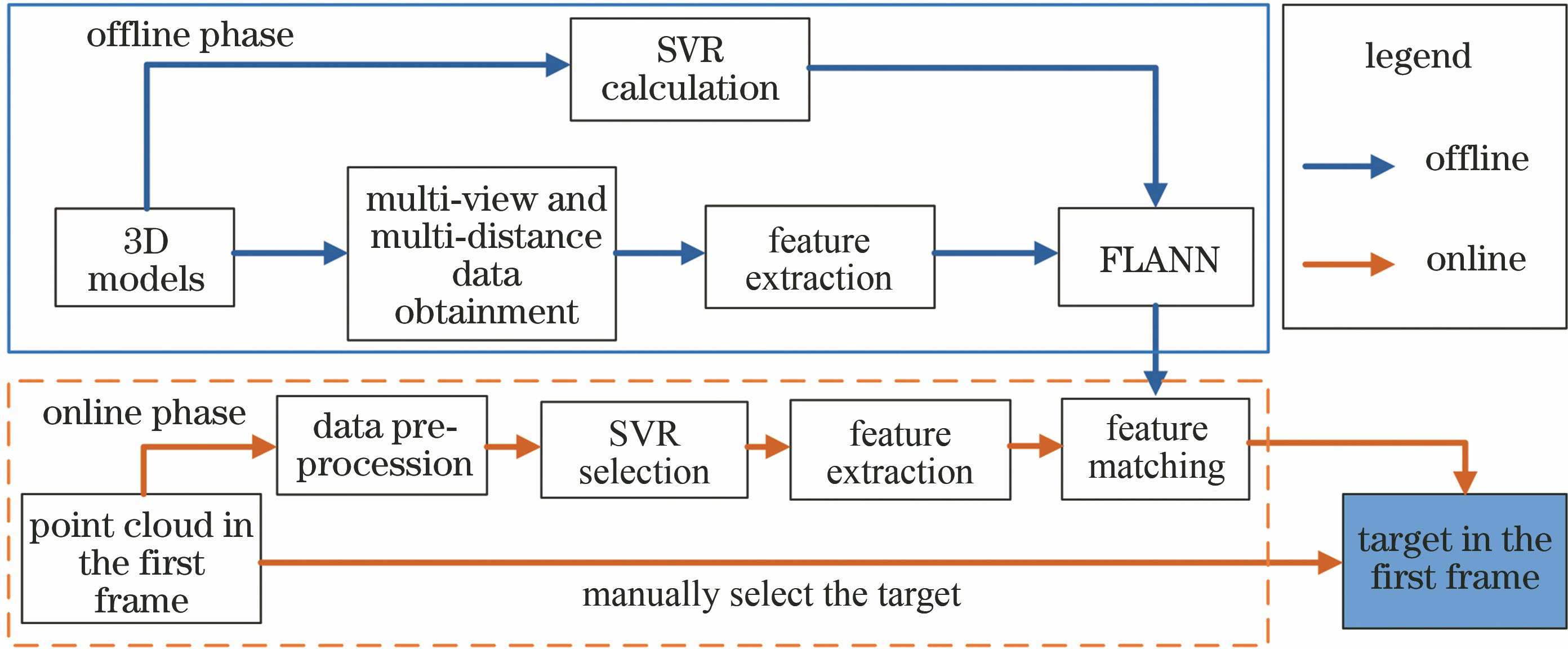
Fig. 1. Point cloud target recognition process based on SVR selection
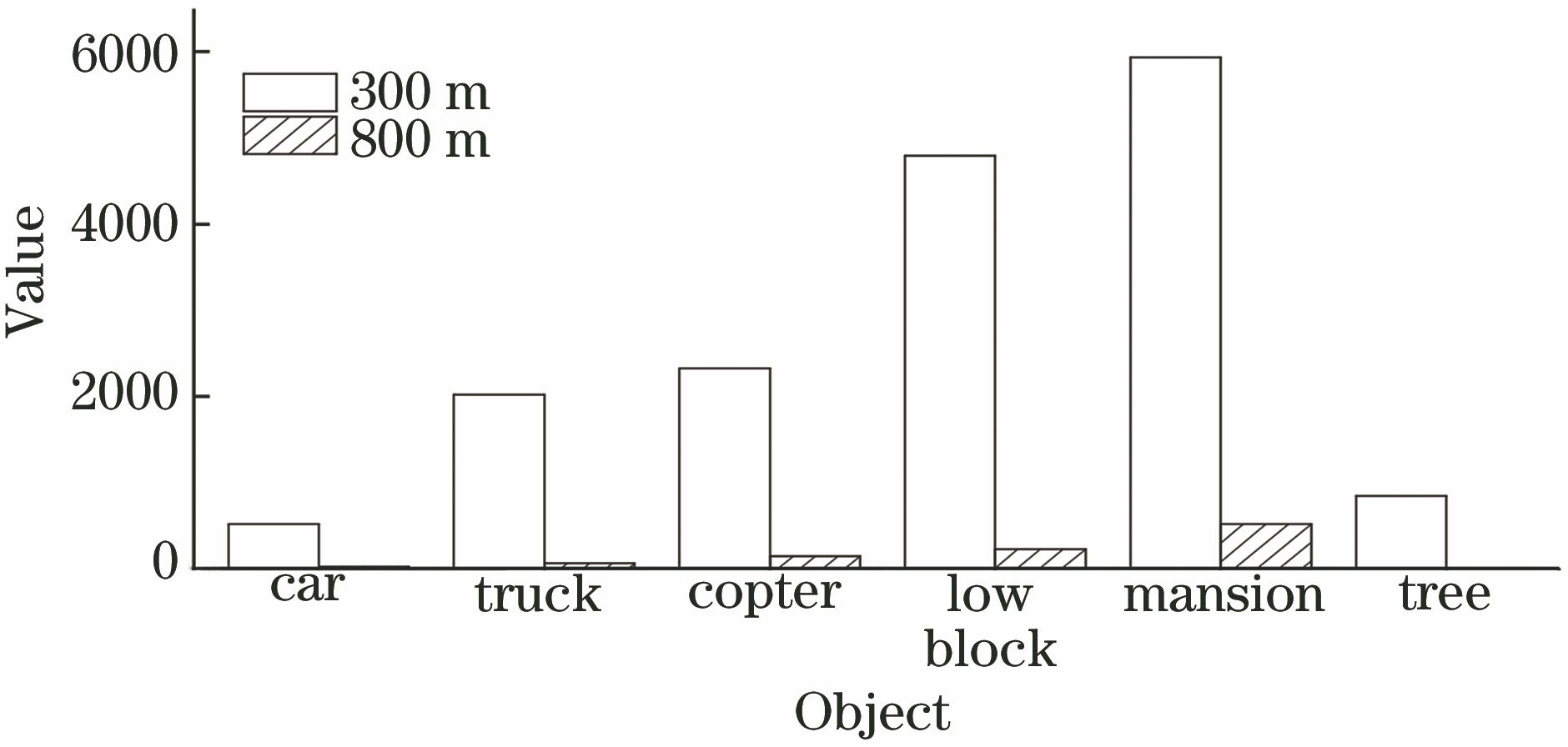
Fig. 2. SVR values of six objects for two LIDAR-object distances
Fig. 3. Point cloud target tracking flow based on global feature matching
Fig. 4. Visualization of different datasets. (a) Dataset 1; (b) dataset 2
Fig. 5. Object tracking results in the N th frame. (a)(g) N=40; (b)(h) N=80; (c)(i) N=120; (d)(j) N=160; (e)(k) N=200; (f)(l) N=240
Fig. 6. Execution time of each part in object tracking based on different datasets. (a) Dataset 1; (b) dataset 2
|
Table 1. Comparison of four global feature descriptors
|
Table 2. Parameters of the scene simulation
| |||||||||||||||||||||||||||||||||||||||||
Table 3. Recognition rate comparison of four feature descriptors%
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4. Recognition rate comparison with and without SVR selection
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 5. Tracking accuracy of sight line in the Nth frame

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20