
Siyong Fu, Lushen Wu, Huawei Chen. Point Cloud Simplification Method Based on Space Grid Dynamic Partitioning[J]. Acta Optica Sinica, 2017, 37(11): 1115007
- Acta Optica Sinica
- Vol. 37, Issue 11, 1115007 (2017)
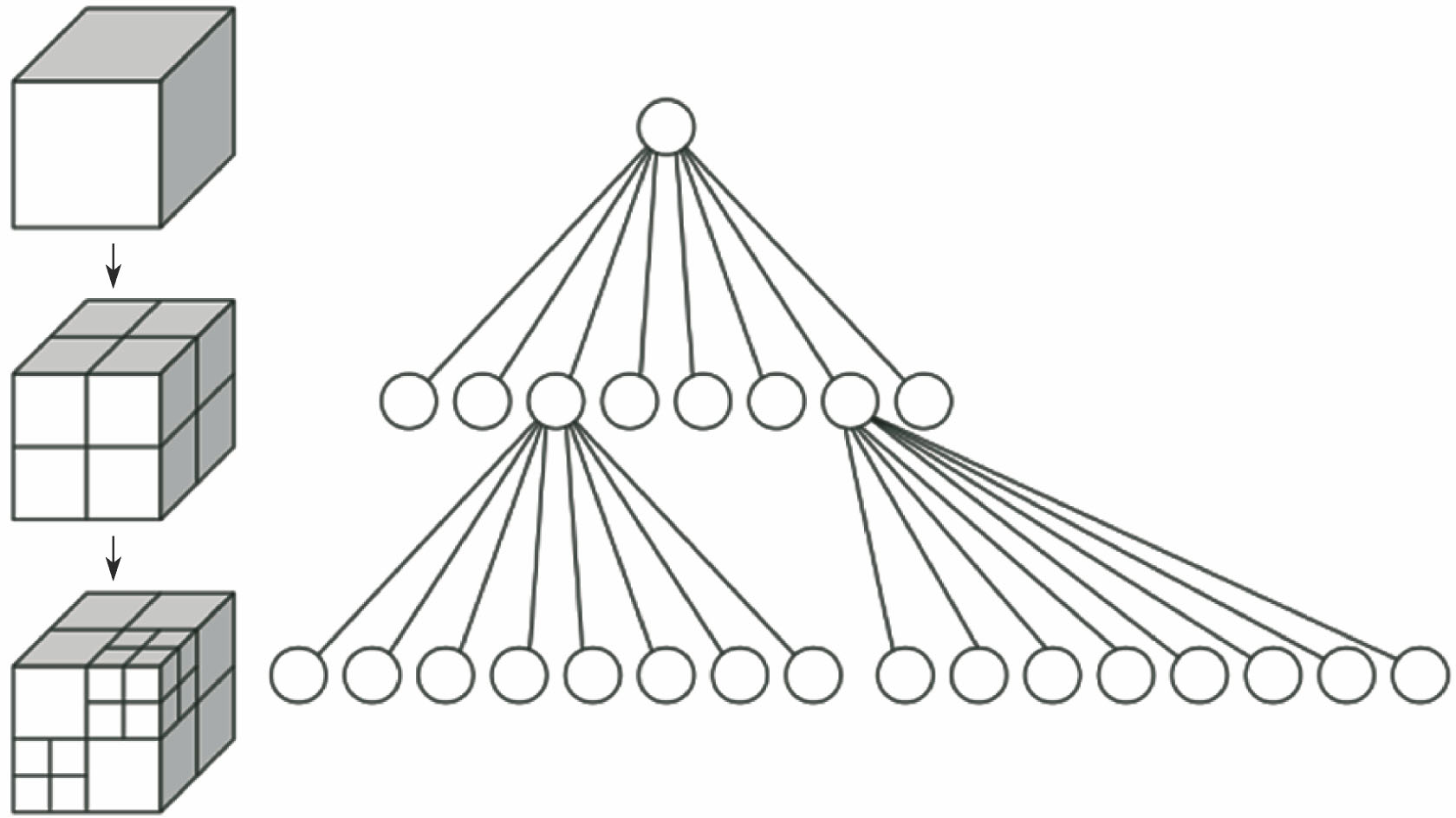
Fig. 1. Schematic of dynamic division
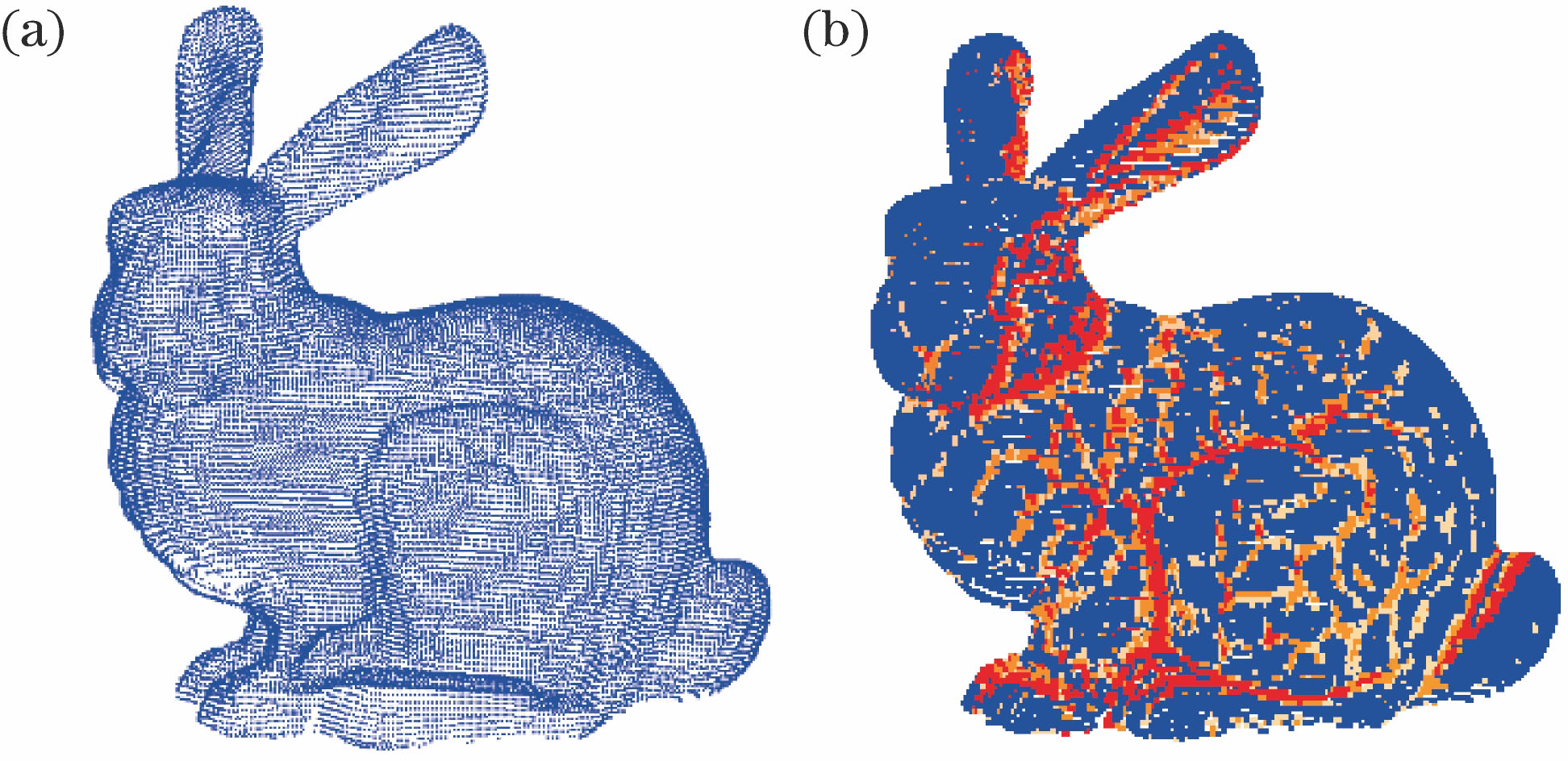
Fig. 2. (a) Original point cloud and (b) feature points
Fig. 3. Simplification results. (a) Reduced by 35.98%; (b) reduced by 65.23%; (c) reduced by 78.12%; (d) reduced by 85.41%
Fig. 4. Simplification results of random sampling method. (a) Reduced by 50%; (b) reduced by 75%; (c) reduced by 87.5%; (d) reduced by 93.75%
Fig. 5. Simplification results of grid method. (a) Reduced by 51.2%; (b) reduced by 75.1%; (c) reduced by 87.43%; (d) reduced by 93.66%
Fig. 6. Simplification results of curvature method. (a) Reduced by 50%; (b) reduced by 75%; (c) reduced by 87.5%; (d) reduced by 93.75%
Fig. 7. Simplification results of proposed method. (a) Reduced by 51.5%; (b) reduced by 75.08%; (c) reduced by 87.53%; (d) reduced by 93.73%
Fig. 8. Simplified error comparison. (a) Maximum error; (b) average error
|
Table 1. Average deviation distance simplified by different methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20