
Lin Xu, Xiangyang Wang, Tomáš Tyc, Chong Sheng, Shining Zhu, Hui Liu, Huanyang Chen. Light rays and waves on geodesic lenses[J]. Photonics Research, 2019, 7(11): 1266
- Photonics Research
- Vol. 7, Issue 11, 1266 (2019)
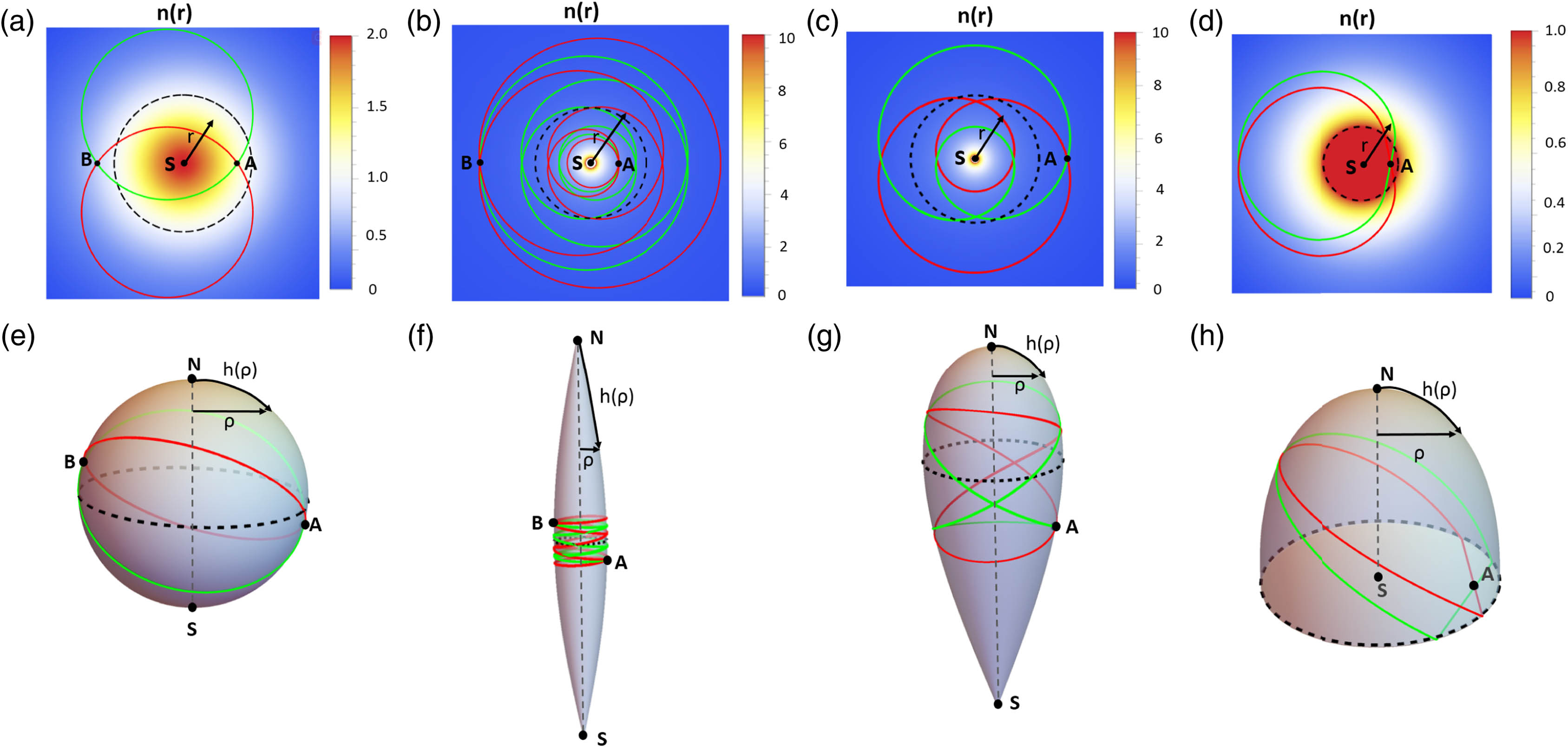
Fig. 1. AIs (upper row) and corresponding GLs (lower row) with rotational symmetry. In AIs, the center of each lens is marked with S . The position vector is denoted with r θ n ( r ) M = 5 M = 5 ρ h ( ρ ) S of AIs, while N poles correspond to the infinities of AIs. Dashed black circles of AIs are places with refractive index of unity at radius of r 0
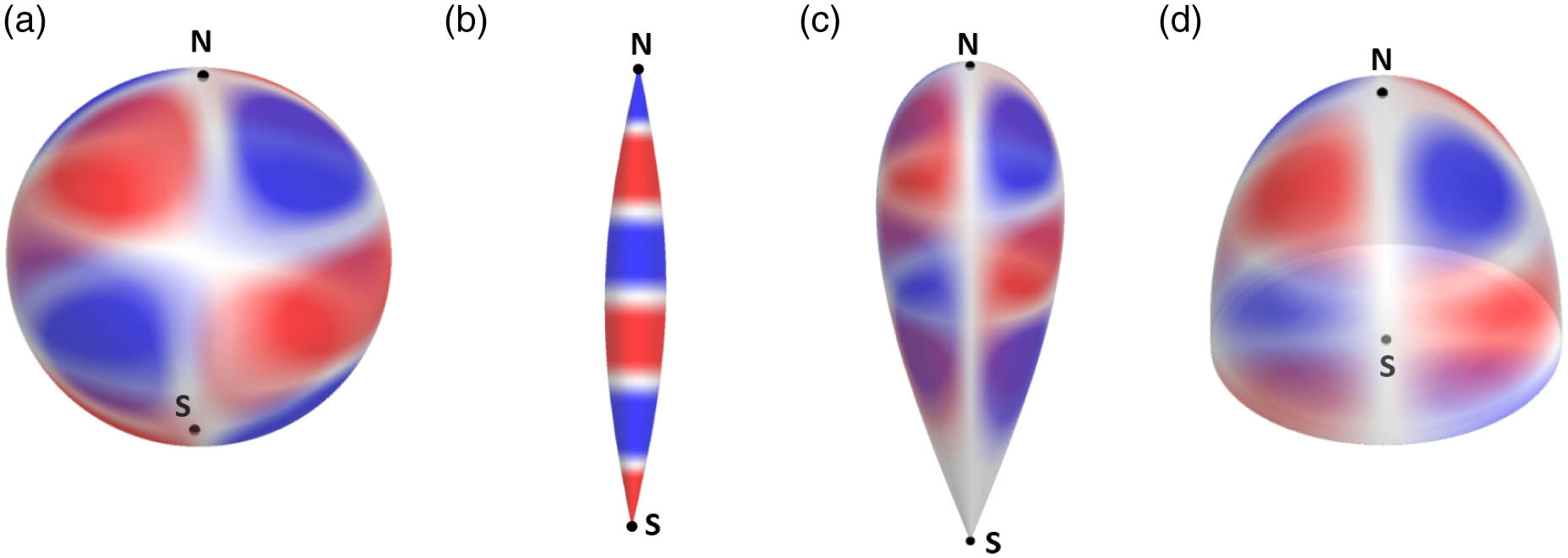
Fig. 2. Real part of the modes with different indices N m ψ 22 ψ 50 ψ 22 ψ 22
Fig. 3. Experimental setup and sample description. (a) Schematic of the observation and coupling scheme of the light to the geodesic lens. A laser beam is coupled to a 3D curved waveguide from the top and excites the rare-earth ions in the waveguide. The emitted fluorescent light at 615 nm is then collected by a CCD camera. (b) 3D curved waveguide morphology captured by a CCD camera when illuminated by white light. (c) Scanning electron microscope image of the 3D curved surface around the coupling grating (red dashed box) before spin coating. The cross structure corresponds to that displayed in (b) and is used to couple laser beams into the waveguide. (d) Scanning electron microscope image of the 3D curved surface with larger scale (blue dashed box) before spin coating. Based on this figure, one can get the accurate parameters of the 3D curved surface.
Fig. 4. Optical measurements and fitting results of light rays in a spindle with M = 5
Fig. 5. Sample fabrication process. (a) Position of straight silver wire, movement console (MC), and hydrogen flame. A straight silver wire is fixed on MC1 and MC2 and then put on a hydrogen flame at a proper position. (b) Metallic wire fusion process. The ends of the straight silver wire are pulled at speeds v 1 v 2
Fig. 6. (a) Sketch of a metallic waveguide. (b) Cross section of the metallic waveguide.
Fig. 7. (a) Sketch of the coupling grating (yellow boxes). (b) SEM image of the metallic curved surface and the coupling grating (in red dashed box) before spin-coating process. (c) Grating coupling process and optical measurement of the sample. The yellow boxes in (a) show the coupling grating, the graded blue spot represents the exciting beam, and the blue arrows show the direction of the laser beam propagating in the waveguide. The coupling grating in (a) corresponds to the red dashed box in (b), which is fabricated before spin-coating process. The red dashed box region in (b) corresponds to the grating in (c), which is indicated by the red arrows.
Fig. 8. Optical measurements and fitting results of light rays on a sphere. (a) CCD camera picture of micro-structured sphere waveguide. (b) Light trajectory on micro-structured sphere waveguide. (c) Fitting the light trajectory with a sphere.
|
Table 1. Description of Four AIs and Corresponding GLs with Spectrum

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20