 AI Video Guide
AI Video Guide  AI Picture Guide
AI Picture Guide AI One Sentence
AI One Sentence

Yuan Wang, Pedro Tovar, Juntong Yang, Liang Chen, Xiaoyi Bao, "Distributed phase-matching measurement for dynamic strain and temperature sensing based on stimulated Brillouin scattering enhanced four-wave mixing," Photonics Res. 12, 141 (2024)
- Photonics Research
- Vol. 12, Issue 1, 141 (2024)
Note: This section is automatically generated by AI . The website and platform operators shall not be liable for any commercial or legal consequences arising from your use of AI generated content on this website. Please be aware of this.
Abstract
1. INTRODUCTION
The process of four-wave mixing (FWM) involving acoustically coupled optical waves from stimulated Brillouin scattering (SBS) was first studied in the 1980s, showing extremely large reflectivities under the right conditions (phase/frequency matching) [1,2]. In this process, the interaction between two optical waves with a frequency difference matching the Brillouin frequency generates an acoustic wave, which modulates the medium’s refractive index scattering light from a third optical wave (probe), resulting in the generation of a conjugated wave (idler). This fourth wave can be generated with high efficiency if the phase matching between the optical and acoustic waves is satisfied, which can be interpreted as a strong reflection from the third optical wave. This phenomenon is known as Brillouin-enhanced four-wave mixing (BEFWM), and it has been observed in different media. The fiber waveguide version of this physics process is often realized in polarization-maintaining fibers (PMFs) [3,4], which has gained significant attention as it translates into a method to measure the Brillouin dynamic grating (BDG) induced by the acoustic wave.
Since the initial proof-of-concept experiment on all-optical dynamic gratings using stimulated Brillouin scattering (SBS), which achieved a reflectance of 4% in a 30 m Panda-type PMF [3], BDGs have been extensively studied. This includes theoretical model analysis [5,6] and demonstrations of BDG operation in various media such as single-mode fibers [7,8], elliptical core two-mode fibers [9], few-mode fibers [10], and dispersion-shifted fibers [11]. Furthermore, BDG-based distributed sensing has garnered considerable attention as the sensitivity of the BDG spectrum to temperature and strain is significantly higher compared to the Brillouin gain spectrum, owing to the highly sensitive birefringence change of the fast axis and the slow axis of PMFs [12]. Therefore, by scanning the probe wave frequency to measure the BDG intensity spectrum through detection of the idler wave, the birefringence of PMFs is readily obtained [13,14]. The first measurement of strain/temperature-induced birefringence variations based on BDG spectrum recovery was demonstrated in Ref. [15]. The idler intensity reflects the efficiency of phase matching of BEFWM, which is directly related to the refractive index difference between the fast axis and the slow axis. The BEFWM-based technique can achieve a high spatial resolution in the centimeters range by obtaining the Brillouin gain spectrum without a broadening effect for distributed sensing [4,16,17]. Besides, there are some works focused on extending BDG-based sensing to achieve dynamic measurements. For instance, one method described in Refs. [18,19] uses a slope-assisted technique to convert the BDG spectrum shift to optical power measurement, enabling dynamic strain measurement with vibration frequencies up to kHz. However, the sensing accuracy in this approach is mainly limited by the measurand dependence on the local optical power, which impairs the performance. In addition, the probe coding technique [20] can improve the signal-to-noise ratio and measurement speed in BDG-based distributed sensing, but it requires coherent detection. In addition, the Brillouin frequency shift and the birefringence change exhibit the same signs for strain dependence, but opposite signs for temperature dependence, which can be used to discriminate the temperature and strain variations with higher accuracy [15,21,22].
For optimal efficiency, the pump signal, Stokes wave, probe wave, and idler wave must satisfy the phase-matching condition
Sign up for Photonics Research TOC. Get the latest issue of Photonics Research delivered right to you!Sign up now
2. METHOD
A. Principle of BDG Generation and Detection in PMFs
The principle of BDG generation and detection in PMFs involves four light waves interacting through material density variations (acoustic wave) among the two polarization axes, as shown in Fig. 1(a). The BDG is generated by injecting two continuous optical waves (pump
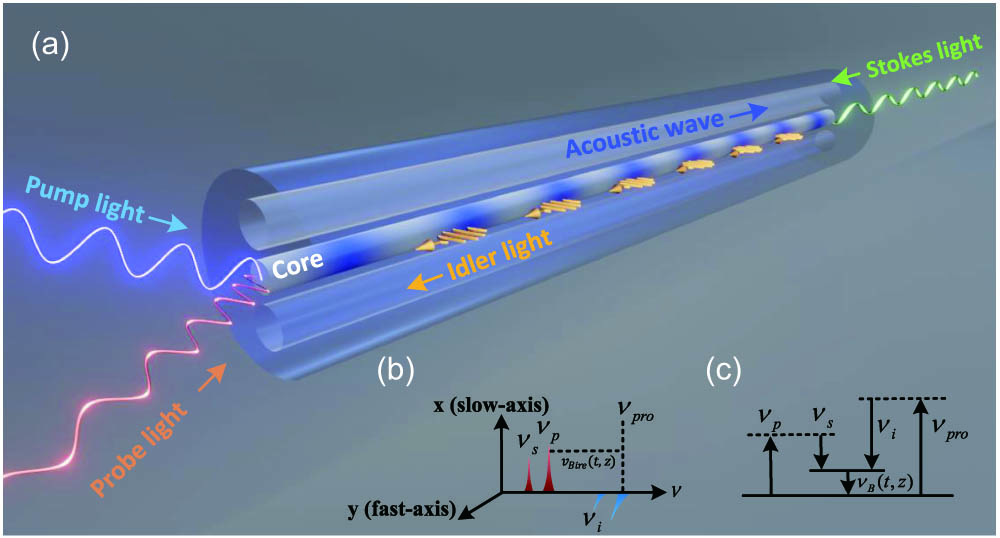
Figure 1.(a) Working principle of Brillouin-enhanced four-wave mixing (BEFWM) in PMF. (b) Optical frequency relationship between the four optical waves in the PMF. (c) Energy diagram of BEFWM.
The interaction between the four waves in the PMF can be regarded as a four-wave mixing process. When the frequency difference between the pump and Stokes waves matches the Brillouin frequency of the slow axis exciting an acoustic wave, the longitudinal acoustic mode couples the optical waves in the orthogonal polarization axis, so that the four optical waves are coupled through [6]
B. Birefringence Variations to Time Delay Mapping
The principle of birefringence change measurement in a PMF via BEFWM with chirped pulses for temperature/strain sensing is illustrated in Fig. 2. Assume that the probe signal for BDG detection in the fast axis has a linearly chirped frequency profile with an instantaneous frequency of
![]()
Figure 2.Principle of distributed birefringence variation-induced time delay measurement in a Brillouin dynamic grating.
Assuming a linear chirp according to Eq. (8), the birefringence-induced time delays observed in the backscattered idler trace will be proportional to the birefringence variations. Therefore, if the chirping range is large enough to compensate for the variations of
3. RESULTS AND DISCUSSIONS
A. Frequency and Time Domain Responses of the Brillouin Dynamic Grating
The comprehensive experimental setup employed in this study, encompassing chirped pulse generation, BDG generation, and idler signal detection, is detailed in Appendix B. As described above, three lightwaves were launched into the fiber: the pump wave (slow axis), the Stokes wave (slow axis), and the chirped pulse as a probe wave (fast axis). We first measured the backscattered power spectrum in the fast axis in an optical spectrum analyzer (OSA) to verify the BDG reflection signal in frequency domain. As depicted in Fig. 3(a), when the pump and Stokes waves are not launched into the fiber, only the Rayleigh backscattered light from chirped pulses is observed. The power of the probe wave is set to a low level to prevent the generation of spontaneous Brillouin scattering, thereby avoiding the generation of Stokes light at the same frequency as the idler signal. When the pump and Stokes waves are included in the system, the measured signal in the fast axis is the nonpolarized endface reflection from the connection between the PBS and PMF, giving a distinct peak in the fast axis at pump frequency. Even though the pump is launched into the slow axis, the generated spontaneous Brillouin scattering with random polarization allows Stokes light to be detected in the orthogonal axis, as observed in Fig. 3(a).
![]()
Figure 3.Backscattering signal of a probe wave from the BDG in the (a) spectral and (b) time domains. In (b), there also is a comparison of the time domain signal with and without frequency chirping.
The intense generation of BDG results in a reflection signal (idler) exhibiting a frequency separation of
To address this issue, a common approach is to sweep the central frequency of the unchirped pulses to obtain the frequency response at each position, and the spatially resolved birefringence profile can be determined by selecting the peak of the local BDG reflection spectrum. However, this solution usually takes a long time to reconstruct the birefringence profile, which reduces the sensing speed (system’s sampling rate) of the distributed dynamic sensing. The intensity fading problem is here solved by launching chirped pulses with a chirping range that covers the birefringence variation range along the fiber. This aspect is verified in the time domain trace shown by the orange curve in the inset of Fig. 3(b). Compared to the unchirped pulse with the same pulse width, the optical frequency components in the chirped pulse occupy a smaller time duration within the entire pulse width. This enables precise spectrum scanning within a time window that is narrower than the pulse width. The linearly chirped pulse can match the birefringence change (associated with the phase-matching condition of FWM) accurately in the spatial domain. This is the key to achieving a higher spatial resolution than the optical pulse width. Furthermore, even though the intensity fading problem is avoided with chirped pulses, the idler intensity still exhibits a jagged profile, which can be attributed to the rapid birefringence fluctuations along the fiber arising from its inherent inhomogeneity. As the chirped pulse propagates along the fiber, at different time instances (corresponding to different pulse locations), each frequency component interacts with the corresponding section of the fiber based on the local birefringence conditions. However, only a subset of these frequency components that satisfies the phase-matching condition will be reflected by BDG, resulting in a jagged time domain pattern due to the changing reflected frequency components caused by local birefringence variations.
B. Distributed Temperature Sensing
Prior to conducting the distributed temperature/strain measurement, experiments were performed to verify the linear correspondence between time delays and pump–probe frequency offset changes (
In the distributed temperature sensing experiment, the DFB laser frequency is initially tuned to achieve a suitable pump-probe frequency offset (
![]()
Figure 4.(a) 2D amplitude map (with interpolation algorithm) of the time domain idler traces with temperature changes applied from 1 to 11 m. Idler traces (b) under different temperatures applied and (c) without temperature changes.
The temperature distribution is reconstructed as follows. The time delays are obtained by selecting a time window with a duration of 5 ns (corresponding to a fiber section of 0.5 m), followed by the calculation of cross-correlation at the same window between a reference trace and subsequent traces taken at different temperatures. The selected time window must cover at least one peak and it is limited by the birefringence-related intensity profile variation. The time window is moved from the beginning to the end; thus, the temperature distribution is reconstructed. This process is depicted in Fig. 5(a). The local time delays (frequency offset changes) are then used to directly resolve the temperature variation. Additionally, an error band is incorporated to illustrate the measured temperature uncertainty at each location. The main source of uncertainty and coefficient nonlinearity is attributed to the distortion of local time traces under temperature change due to stress rods with different thermal coefficients induced local birefringence change. This issue could be released by reducing the variation step between two single-shot measurements as shown in strain measurement results in next section, in which a finer variation step is applied. Increasing the time window size is another option. The larger time window of many different beat lengths in phase-matching conditions is equivalent to smoothing out the temperature-induced spatial dependence on birefringence, resulting in better accuracy at the cost of the spatial resolution, as shown in Fig. 5(b). Based on the frequency chirping rate of 44.8 MHz/ns in Fig. 11(c) of Appendix C, the theoretical coefficient between local time delay (
![]()
Figure 5.(a) Recovered time-delay along the fiber. (b) Temperature measurement linearity with the same temperature variations but different time window lengths. (c) Time-delay relationship with the applied temperature at the 2 m location. (d) Time-delay statistics obtained from an undisturbed fiber section, indicating a noise equivalent temperature variation of 5.6 mK.
C. Distributed Strain Sensing
The distributed strain sensing capability is further demonstrated by subjecting a 1 m section of the PMF to stretching. One end of the stretched section is affixed to a fixed translation stage, while the other end is secured to a highly precise piezoelectric transducer (PZT) that can apply static or dynamic strain to the fiber section. First, static strain measurements were conducted, and Fig. 6(a) shows the 2D intensity map of idler traces with varying static strain applied. The figure clearly indicates longitudinal time shifts occurring around the section of 5–6 m in response to different static strain variations. The same post-processing procedure performed to reconstruct the temperature profile with cross-correlation between the time windows of subsequent traces is done here for strain recovery. As shown in Fig. 6(c), only the fiber sections from 5 to 6 m show significant strain variations, while other locations show small strain fluctuations from the system and environmental noises. The spatial resolution here is about 0.5 m, limited by the width of the selected time windows. The strain-induced time delay coefficient is also explored, as shown in Fig. 6(b), giving a sensitivity of 28.2 ps/με. Based on the frequency chirping rate characterization in Fig. 11(d) in Appendix C, the theoretical coefficient between the local time delay (
![]()
Figure 6.(a) 2D intensity map of the idler traces in the time domain with a strain change from 0 to 20 με. (b) Relationship between applied strain variations and time delays. (c) Strain distribution along the PMF. (d) Noise equivalent strain variations.
Finally, the strain measurement accuracy is evaluated from the nondisturbed region [Fig. 6(d)], which gives a standard deviation of strain variations of 0.37 με. The dynamic range of the proposed method is limited by the frequency chirping range of the pulse, but the measurable peak-to-peak amplitude can be relatively large with a higher sampling rate, depending on the variation frequency.
In the dynamic strain measurement, three sinusoidal strain variations with peak-to-peak amplitudes of 10, 20, and 40 με, and a frequency of 1 Hz, are applied to a 1 m section of the PMF. The resulting changes in the intensity of the idler traces with respect to time and position are collected with an acquisition rate of 1 kHz (pulse repetition rate 1 kHz), and the results are depicted in Fig. 7(a). The choice of a 1 kHz repetition rate is constrained by the memory capacity of the oscilloscope, but it can be raised to the limits imposed by the fiber length. It clearly shows the peak of the idler traces around the 5 m section experiences sinusoidal time shifts, while the intensity of the traces in other sections remains unchanged. The strain variations near the 5 m location with different amplitudes applied are shown in Fig. 7(b), which is calculated from the local time delays between two consecutive traces through the cross-correlation calculation within the time window of 5 ns. The demodulated peak-to-peak strain amplitude agrees with the applied value with a relatively small uncertainty. To verify the minimum detectable strain variations, a 1 Hz sinusoidal strain variation with a peak-to-peak amplitude of 2 με is applied on the fiber, and the reconstructed signal with an interpolation algorithm in the idler traces is shown in Fig. 7(c). The use of an interpolation algorithm results in a higher density of data points for each idler trace, leading to an improved time delay measurement resolution. This, in turn, enhances the accuracy of the strain measurement and frequency resolution. The improvement with interpolation becomes evident when analyzing the frequency spectrum of the post-processed signal through a fast Fourier transform (FFT), as shown in Fig. 7(d). The demodulated signal obtained with the interpolation algorithm exhibits a higher signal-to-noise ratio (SNR), with significant suppression of noise peaks around 0.6 and 1.7 Hz. The highest measurable frequency in this proposed set is only limited by the sampling rate of the system, ultimately restricted by the light traveling time in the fiber length.
![]()
Figure 7.(a) 2D intensity map of the idler traces with dynamic strain variations applied. (b) Demodulated dynamic strain variations profile in the 5–6 m section. (c) Dynamic strain variations measurement with a peak-to-peak amplitude of 2 με and (d) its FFT analysis.
D. High Spatial Resolution Analysis
In conventional Brillouin scattering-based sensing techniques, the spatial resolution is typically limited by the phonon lifetime, which is approximately 10 ns, resulting in a spatial resolution of around 1 m. However, in the proposed technique presented here, the spatial resolution is significantly improved to 0.5 m by using a chirped pulse as the probe signal based on results above. This is achieved due to the absence of an SBS spectrum recovery process. Any technique used to recover the SBS spectrum carries the phonon lifetime information, which manifests as a spectral broadening and thus prevents the measurement of small spectral shifts. The chirped pulse allows for the measurement of the phase-matching condition of BEFWM instead of the SBS gain spectrum, resulting in an enhanced spatial resolution. In our proposed technique, the spatial resolution is determined by the birefringence variation and the frequency chirping rate. The effective pulse width, which accounts for these two parameters, ultimately determines the achievable spatial resolution. This is because the reflection probe signal in our proposed technique is dependent on the pump-probe frequency offset. In contrast to Rayleigh scattering, which exhibits responses for any incident frequency within the chirped pulse [23,24], the detection of BDG reflection requires phase-matching between four optical waves coupled by the acoustic wave. As a result, only certain frequency components within the chirped pulse satisfy this condition and are reflected by the BDG, so the phase-matching condition is satisfied at specific locations within the pulse width. For a given birefringence variation, the effective pulse width that covers these frequency components could be much smaller than the pulse width. The range of the frequency band within the chirped pulse that satisfies the phase-matching condition is determined by the frequency chirping rate.
To investigate the impact of the frequency chirping rate on spatial resolution, we generated chirped pulses with varying chirping rates as the probe signals for the birefringence variation measurement. As shown in Fig. 8(a), all time-domain idler traces exhibit a time-varied profile, but with a different number of peaks and contrast. With the increased chirping rate, the same BDG gain bandwidth occupies a narrower time duration, giving a high spatial resolution. Thus, a faster time-varied profile with more peaks will be obtained. The peak number is counted within the 3 dB band for each trace, and the result is shown in Fig. 8(b). It is important to note that the BDG gain bandwidth is also length-dependent [25], meaning that a shorter interaction duration will result in a broader gain bandwidth. Hence, the chirping rate increases from 93.5 to 188 MHz/ns, giving a short occupation time duration with broadened BDG gain spectrum, and resulting in the same number of peaks. Besides, a shorter interaction time duration may also lower the contrast of the idler traces, as the probe signal’s optical power within the effective pulse width decreases with an increasing chirping rate. This relationship between the chirping rate and contrast is shown by the brown line in Fig. 8(b). Even if the detection end has enough SNR and contrast, the idler signal is finally getting flat, since the interaction section will be very small and the local phase-matching conditions are always satisfied. Finally, the spatial resolution was verified using the relatively optimized chirping rate of 93.5 MHz/ns, in which the fast varied intensity profile allows a short time window (
![]()
Figure 8.(a) BDG reflection signal with different chirping rates. (b) Relationship between the number of peaks/signal contrast and the chirping rate. (c) Static strain distribution along with the fiber.
4. CONCLUSION
The paper presents what we believe, to the best of our knowledge, is a novel sensing system based on BEFWM with chirped pulse interrogation. The technique is able to measure distributed birefringence variations along PMFs, which were shown to be proportional to local time delays in the signal reflected by BDGs. As the birefringence is affected by temperature/strain, the technique allows for distributed temperature and strain sensing. The paper starts with an experimental characterization, where the frequency offset between the probe and pump signals is varied, showing a linear relationship due to the use of linearly chirped pulses. This validates the effectiveness of the proposed sensing system in measuring birefringence variations. Next, the distributed temperature and dynamic strain measurements are demonstrated on a section of PMF. The results show good linearity of temperature/strain-related time delay coefficients, indicating the capability of the proposed system for accurate and reliable temperature and strain measurements. Dynamic strain measurement is further validated by applying a sinusoidal variation profile with a frequency of 1 Hz, and the reconstructed peak-to-peak amplitude of 2 με from 1 kHz sampling rate shows the system’s ability to capture small dynamic strain variations. The spatial resolution of the system is analyzed by using different chirping rate pulses, and it is shown that a high spatial resolution of 10 cm is achieved using a frequency chirping rate of 93.5 MHz/ns, indicating the system’s capability for high-resolution measurements. Overall, the paper demonstrates the feasibility of using the proposed distributed phase-matching measurement with a fast sampling rate, high accuracy, and high spatial resolution.
Acknowledgment
Acknowledgment. The authors would like to thank Chen Chen, Haiyang Wang, Haokun Yang, and Gerard Tatel for their helpful discussions.
APPENDIX A: THEORETICAL ANALYSIS OF BIREFRINGENCE VARIATIONS TO TIME DELAY MAPPING
Birefringence, as a crucial property of polarization-maintaining fiber (PMF), is introduced by the difference in the thermal contraction between
![]()
Figure 9.Illustration of the birefringence property in the PMF.
The stimulated acoustic wave generated in the slow axis gives a spatially varied refractive index, which is common to both polarizations in the two axes. However, the birefringence converts this common spatial frequency to a different optical frequency for the two axes (
The strain/temperature-induced frequency offset
Thus, the relationship between the birefringence variations (
APPENDIX B: EXPERIMENTAL SETUP
The experimental setup based on Brillouin dynamic gratings-assisted distributed birefringence variations measurement for temperature and strain sensing is shown in Fig.
![]()
Figure 10.Experimental setup for distributed temperature and strain sensing based on BDG detection in the PMF. DFB laser: distributed feedback laser; SOA: semiconductor optical amplifier; EDFA: erbium-doped optical fiber amplifier; PC: polarization controller; PBS: polarization beam splitter; NLL: narrow linewidth laser; PG: pulse generator; OBPF: optical bandpass filter; PD: photodetector; and OSC: oscilloscope.
In another branch of the PBS, CW light from a narrow linewidth laser (NLL) source is divided into two beams aligned to the slow-axis polarization and then are sent to the two ends of PMF, acting as the pump signal and Stokes signal to excite the BDG. For the idler signal (probe signal reflection from the BDG) detection, an optical bandpass filter is used to filter out the other three waves in a fast-polarized backscattered signal, such that only the idler wave is detected at a photodetector (PD). Finally, the time domain could be collected by the oscilloscope (OSC), and the drive current of DFB laser is controlled by the computer to change the initial optical frequency for simulation purposes.
APPENDIX C: SIMULATION RESULTS OF OFFSET FREQUENCY VARIATIONS TO TIME DELAY MAPPING
As shown in Fig.
![]()
Figure 11.Simulation results of changing the pump-probe frequency offset (
APPENDIX D: BIREFRINGENCE SENSITIVITIES TO TEMPERATURE/STRAIN
In a high-birefringence fiber, such as a Panda-type PMF, the birefringence scale is determined by the residual tensile stress (
In contrast, when an axial strain variation
References


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20