
Qing Yang, Yuqian Zhao, Fan Zhang, Miao Liao. Liver Segmentation from CT Volumes Based on Spatial Fuzzy C-Means and Graph Cuts[J]. Laser & Optoelectronics Progress, 2022, 59(12): 1217002
- Laser & Optoelectronics Progress
- Vol. 59, Issue 12, 1217002 (2022)
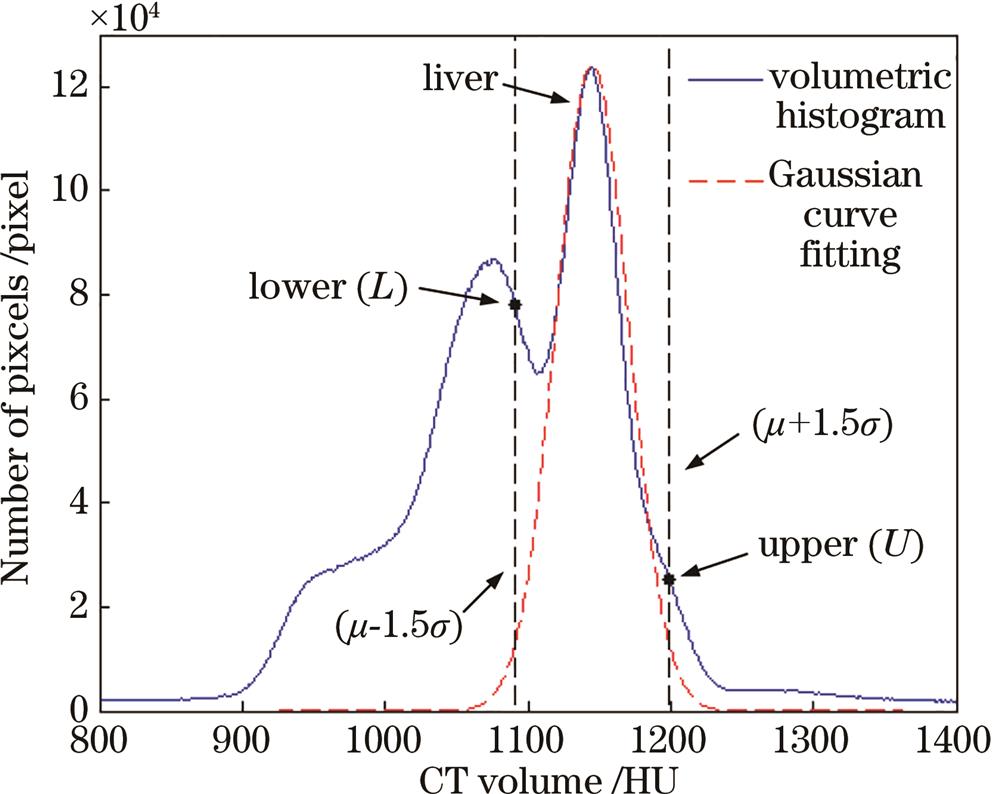
Fig. 1. Volumetric histogram of CT volume with DICOM data
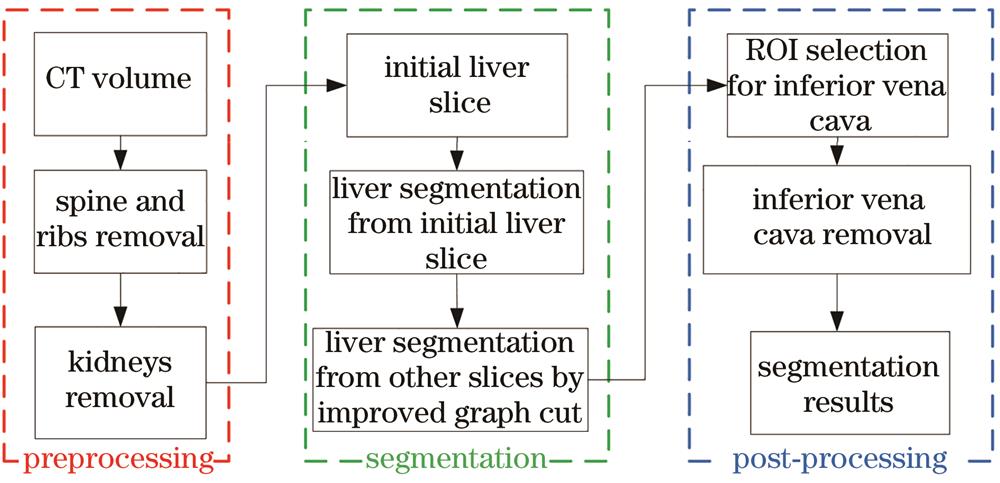
Fig. 2. Flowchart of proposed method
Fig. 3. Removal of spine and ribs
Fig. 4. Liver segmentation from initial slice
Fig. 5. Segmentation result. (a) Without location information; (b) with location information
Fig. 6. Constrains estimation. (a) Result of previous segmentation; (b) image to be segmented; (c) image of distance transformation
Fig. 7. Comparison of segmentation results. (a) Without neighborhood pixels; (b) with neighborhood pixels
Fig. 8. Removal of inferior vena cava. (a) Result of segmentation; (b) result of erosion; (c) region of postcava; (d) result of postcava removal
Fig. 9. Result comparison of HLS, IRG, and proposed methods. (a) Results of HLS; (b) results of IRG; (c) results of proposed method
Fig. 10. Performance comparison of three methods over 20 CT volumes. Horizontal axis is number of CT volume and vertical axis are values of 5 evaluation methods, respectively. (a) VOE; (b) RVD; (c) ASD; (d) RMSD; (e) MSD
|
Table 1. Performance comparison of three methods. Results of each method are mean and standard deviation of all test data

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20