
Jiayuan Liu, Guohui Wang. Stereo Vision-based Calibration Approach for Position Parameters of LED in Photometric Stereo[J]. Laser & Optoelectronics Progress, 2022, 59(16): 1615001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 16, 1615001 (2022)
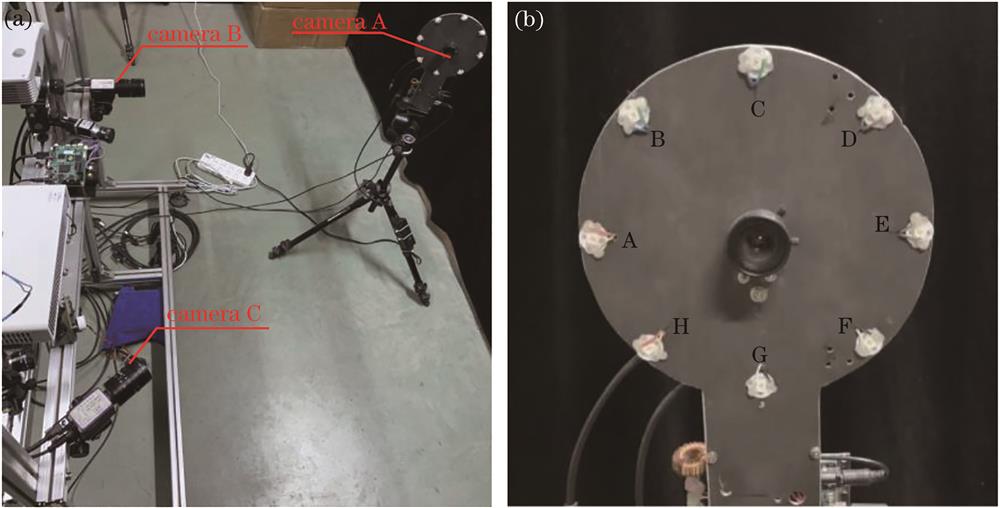
Fig. 1. Position calibration system of the LED light source based on stereo vision. (a) Diagram of actual experimental scene; (b) diagram of the LED light source distribution
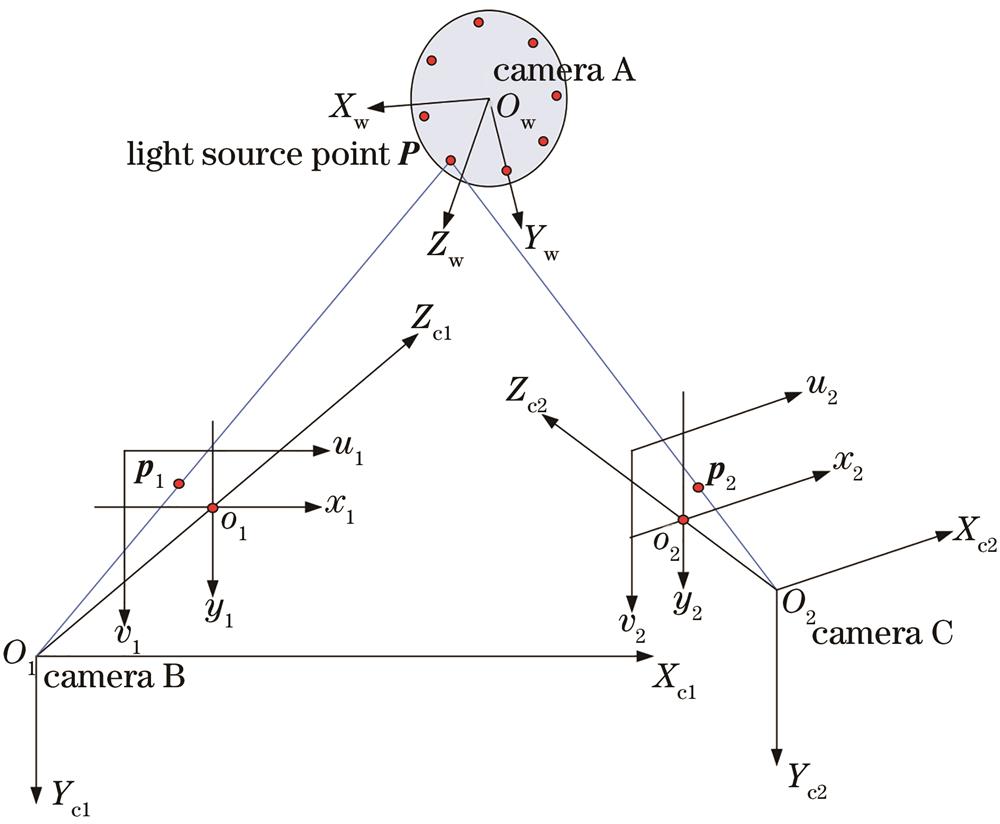
Fig. 2. LED light source position parameter calibration system
Fig. 3. Schematic of the stereo vision simultaneous calibration system
Fig. 4. Reprojection error of the camera. (a) Camera A; (b) camera B; (c) camera C
Fig. 5. Reprojection error of binocular stereo vision system. (a) Camera A, B; (b) camera B, C
Fig. 6. LED light source images captured by the binocular camera. (a) (b) LED light source A captured by left and right cameras; (c) (d) LED light source A‒H captured by left and right cameras
Fig. 7. LED light source position calibration experiment results. (a)
|
Table 1. Camera parameters
| ||||||||||||||||||||
Table 2. Camera internal parameters
| ||||||||||||
Table 3. Structural parameters of stereo vision system
|
Table 4. 3D coordinates of LED light sources based on stereo vision
|
Table 5. Diagonal distance of LED light sources based on stereo vision
|
Table 6. 3D coordinates of LED light sources based on specular reflection method
|
Table 7. Diagonal distance of LED light sources based on specular reflection method
| |||||||||||
Table 8. Three-dimensional coordinate error of the LED light source based on specular reflection and stereo vision

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20