
Rongsheng Lu, Yanqiong Shi, Haibing Hu. Review of Three-Dimensional Imaging Techniques for Robotic Vision[J]. Laser & Optoelectronics Progress, 2020, 57(4): 040001
- Laser & Optoelectronics Progress
- Vol. 57, Issue 4, 040001 (2020)
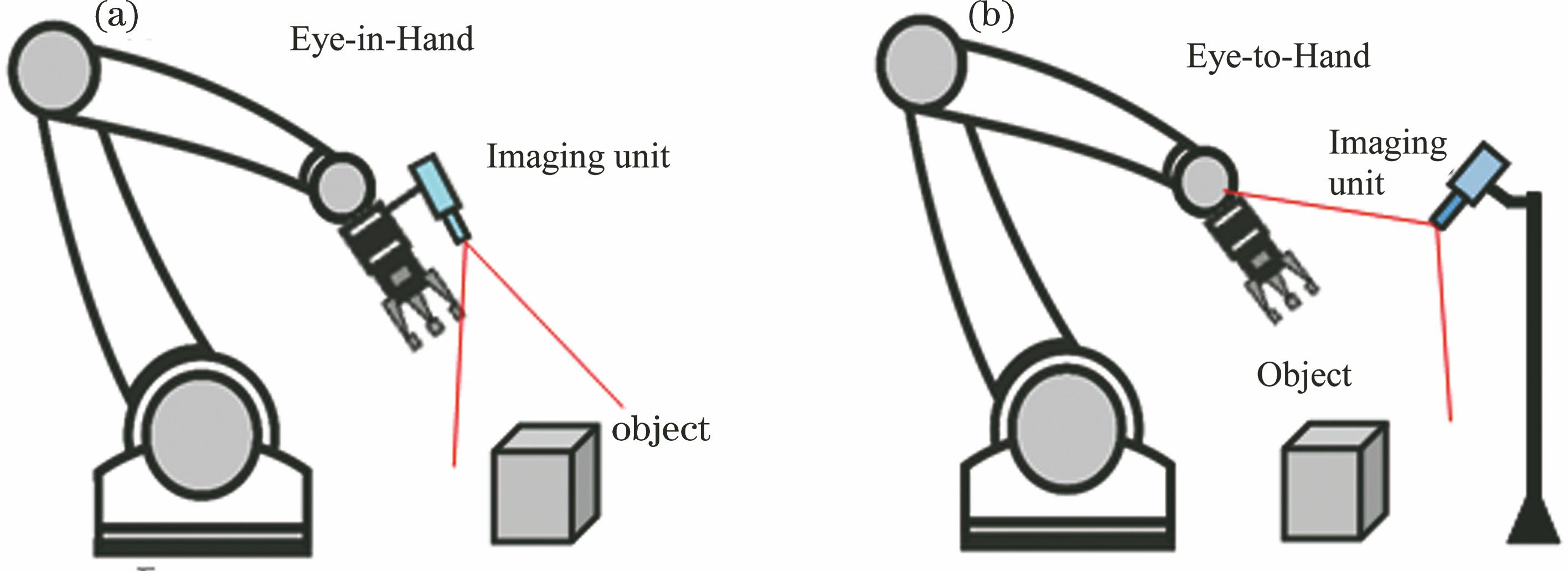
Fig. 1. Configurations of two hand eye systems. (a) Eye-in-hand robotic system; (b) eye-to-hand robotic system
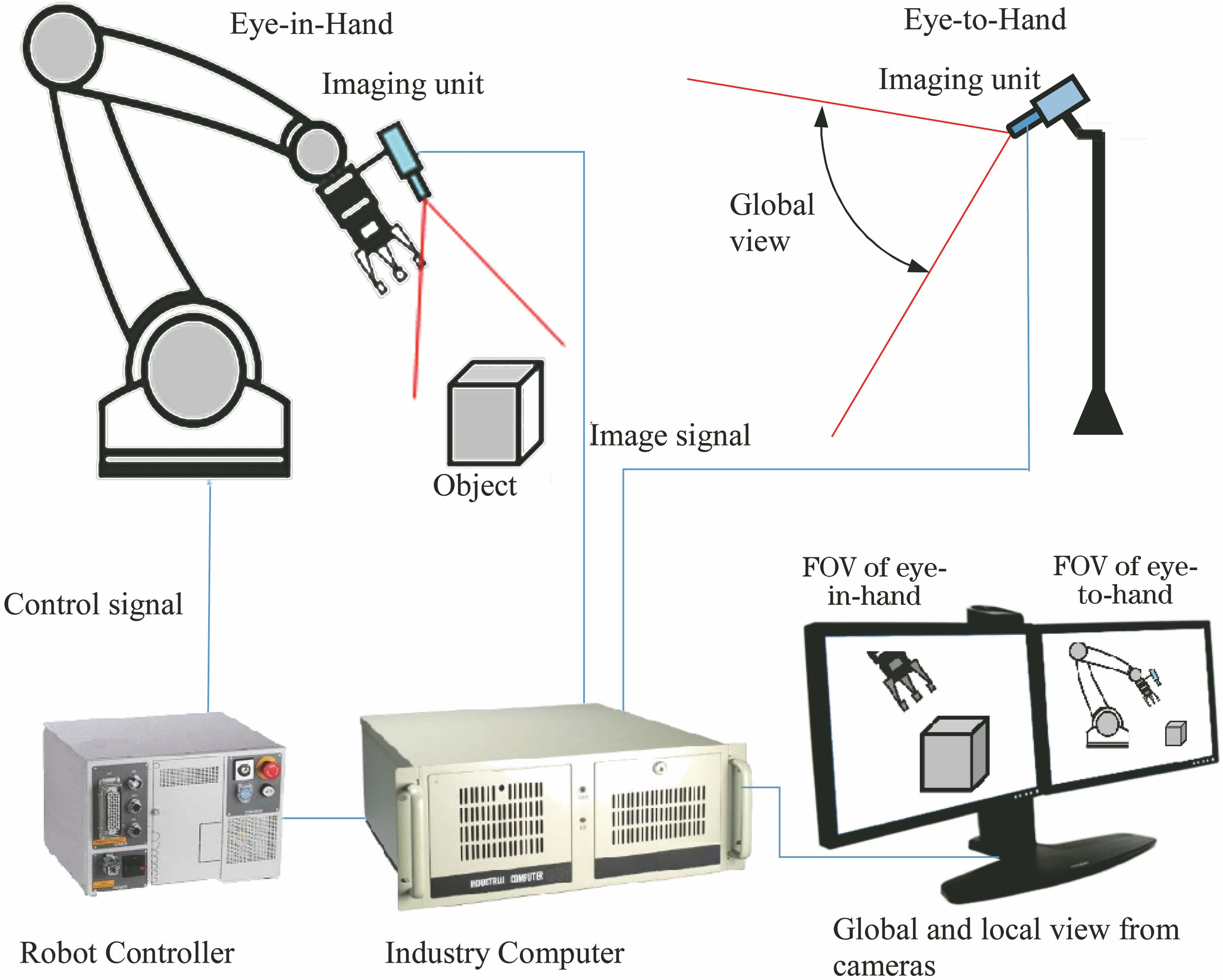
Fig. 2. Schematic of a cooperative vision system of robots
Fig. 3. TOF imaging principle[24]
Fig. 4. Active triangulation scanning imaging methods[34]. (a) Distance measurement using a collimating beam light; (b) 2D measurement with a sheet of light projection; (c) 3D measurement with a multi-sheet light projection
Fig. 5. 3D measurement principle of flying triangulation[36]
Fig. 6. Two types of chromatic confocal measurement technology. (a) Structure based on pinhole and beam splitter; (b) structure based on Y-type optical fiber
Fig. 7. Two type schematics of chromatic confocal line scan imaging techniques. (a) Chromatic confocal microscope[43]; (b) chromatic confocal triangulation[44]
Fig. 8. Principle and algorithm process of pseudo-speckle projection 3D imaging
Fig. 9. Multi-shot 3D imaging. (a) Configuration schematics of a multi-shot 3D imaging; (b) principle of binary Gray code 3D imaging; (c) mixed encoding with binary Gray code and phase shifting for 3D imaging
Fig. 10. Schematics of deflectometry for bright surface. (a) Demonstration of an eye-in-hand robot for deflectometry[83]; (b) explanation of measurement process of deflectometry[89]
Fig. 11. Principle of deflectometry
Fig. 12. Schematic diagram of binocular stereo vision system and calculation process[113]
Fig. 13. Principle of multi-view imaging[114]
Fig. 14. Imaging comparison between light field camera and traditional camera. (a) Imaging principle of traditional camera; (b) structure and imaging principle of light field camera
Fig. 15. Inside structure of the Lytro light field camera[119]
Fig. 16. Development trends of light field camera and some products illustration[121]
Fig. 17. Genealogy of robot 3D vision imaging methods
Fig. 18. Optimization scheme of 3D vision imaging system for eye-in-hand robots
Fig. 19. Occlusion problem of triangulation 3D imaging

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20