
Wang Pan, Feng Zhu, Yingming Hao, Limin Zhang. Pose Measurement Method of Three-Dimensional Object Based on Multi-Sensor[J]. Acta Optica Sinica, 2019, 39(2): 0212007
- Acta Optica Sinica
- Vol. 39, Issue 2, 0212007 (2019)
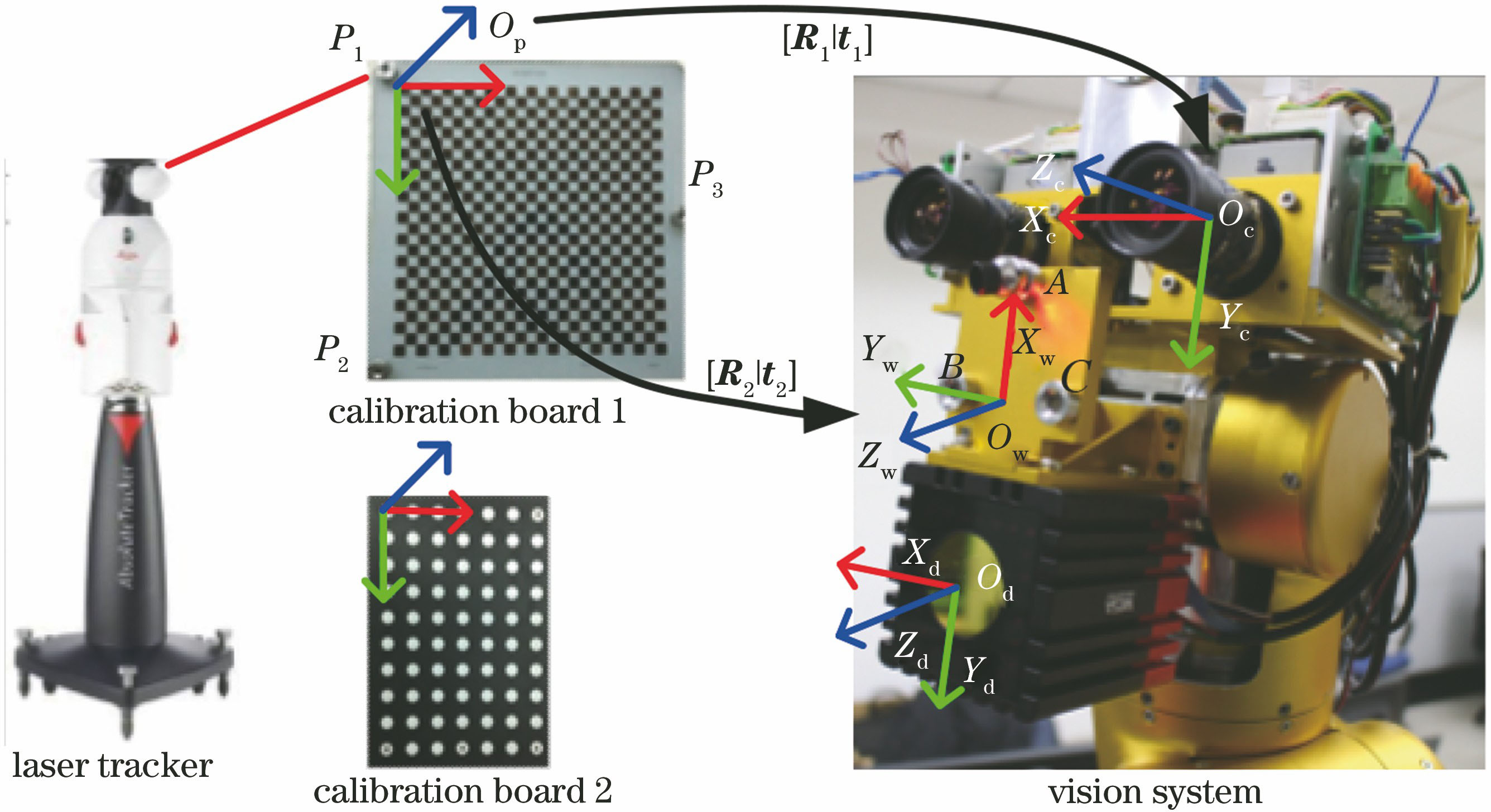
Fig. 1. Coordinate system definition and calibration of the visual system
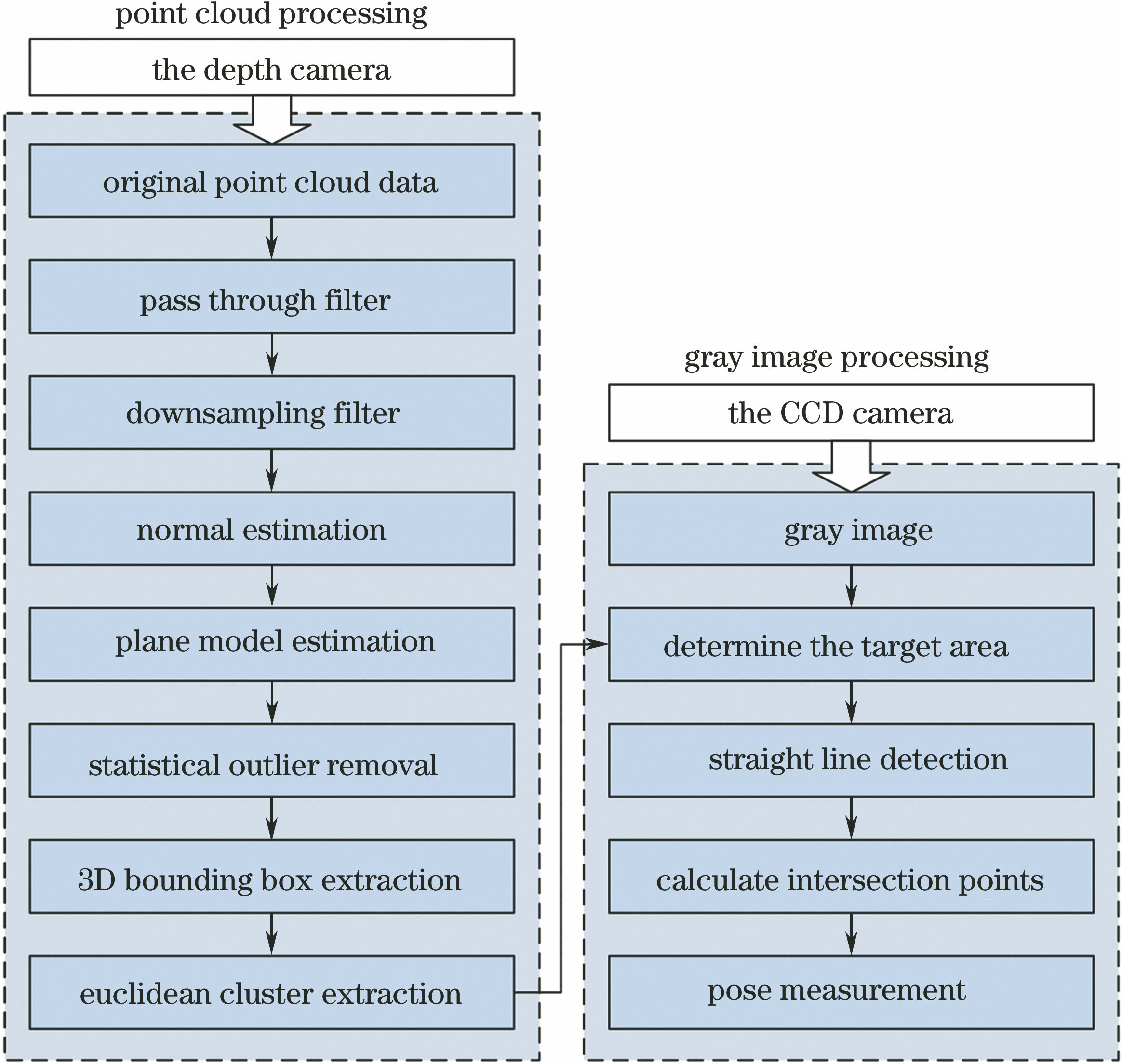
Fig. 2. Flow chart of the proposed method
Fig. 3. Object model and measurement results. (a) Three-dimensional model and definition of coordinate system of the object; (b) pose measurement result
Fig. 4. Influence of grid size on the number of sampling points and efficiency of RANSAC
Fig. 5. Result of target point cloud segmentation
Fig. 6. Points in the gray image corresponding to the segmented target point cloud
Fig. 7. Representation of a line in a polar coordinate system
Fig. 8. Establishment of experimental environment. (a) Experimental environment; (b) targets to be measured
Fig. 9. Results of linear feature extraction. (a) Space handrail; (b) drawer handle
|
Table 1. Measurement accuracy
|
Table 2. Running time comparison

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20