Road safety is crucial for public well-being and economic prosperity. Accurate and comprehensive pothole inspection is essential to identify potential safety hazards early and take prompt maintenance measures to ensure public safety. Traditional manual inspection has drawbacks including limited staff safety, slow and expensive processes, etc. Hence, efficient and automated technologies and methods are urgently needed for pavement pothole inspection. Intelligent inspection research focusing on safety enhancements includes vibration anomaly detection, two-dimensional (2D) image processing, and three-dimensional (3D) stereo detection. However, vibration anomaly detection methods may suffer from leakage, while 2D image-based detection methods are susceptible to environmental factors like light, shadows, and water, leading to inaccurate results. Additionally, in 3D stereo detection methods, line structured light scanning technology is limited to single-lane scanning, while 3D reconstruction methods are more demanding in terms of images and algorithms, showing lower robustness. Existing pothole detection methods from vehicle-borne laser point cloud rely on fitting local line or surface models and using height differences to identify pothole, but accuracy is compromised due to the complexity and slope of the pavement. Inaccurate local models and relative distances are significant factors contributing to the incorrect extraction or omission. To address these challenges, we propose a novel method for detecting pavement potholes from vehicle-borne laser point clouds. The goal is to assist road maintenance departments in inspecting and maintaining pavements more effectively, ultimately enhancing the efficiency of pavement damage extraction.
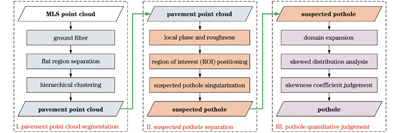
Addressing the challenges associated with pothole detection using vehicle-borne laser point clouds, which can be influenced by road transverse and longitudinal slopes leading to misdetection and omission, in this paper we propose a novel pothole detection method based on roughness and negative skewed distribution. The method involves three main steps: pavement point cloud segmentation, pothole preliminary separation, and statistical quantitative judgement. To begin with, the cloth simulation filter (CSF) algorithm is used to obtain ground point clouds, followed by the segmentation of pavement point clouds from the complex road scenes through verticality and hierarchical clustering. Subsequently, a local plane model is fitted using the M-estimated sample consistency (MSAC) method to obtain the relative directed distance (i.e., roughness), enabling the localization of potential potholes. Density-based spatial clustering of applications with noise (DBSCAN) and point cloud continuity are then utilized for the singularization and denoising of potential potholes. Next, a neighborhood expansion process is conducted for potential monolithic potholes, and their identification is accurately determined based on the statistical laws of roughness distribution and the skewness coefficients. Geometric features such as depth, projected area, and repair size are computed considering the independence and regional connectivity of the potholes. Finally, experiments are conducted using both open source data and measured data to validate the effectiveness and accuracy of the proposed method.
Based on the continuity and flatness of the pavement, as well as the vertical characteristics of road curbs and their separation as pavement boundaries, this study firstly acquires the accurate pavement point clouds (Fig. 14). The proposed method can accurately detect potholes in multiple lanes and different shapes in both open source data (Figs. 15 and 16) and measured data (Figs. 17 and 18), which proves the effectiveness of the proposed method. Field inspections of the measured data scene reveal impressive results for pothole detection using the proposed method, with a recall rate of 89.2% and an accuracy rate of 76.7%. Notably, both indicators outperform similar methods by over 10% (Table 2). Additionally, the maximum relative deviation of potholes' 3D geometric features between the proposed method and manual field measurement is 9.4% (Table 3 and Fig. 19), further highlighting the applicability and robustness of the proposed method. The experimental results demonstrate the applicability and robustness of the proposed method, which can avoid the inaccuracy of the relative distance due to local grids (Fig. 3) and further improve the judgement of potholes by statistical features.
In this study, a novel method for pavement pothole detection that integrates roughness and negative skewed distribution is proposed. Firstly, the pavement point cloud is extracted from the intricate road environment using the CSF method, along with verticality and hierarchical clustering. Then, MSAC is used to fit the planes in order to obtain accurate local planes and relative distances. For the noise issue, DBSCAN and point cloud continuity are used for denoising and singularization of potential potholes. To achieve accurate judgement of potholes, the potential potholes along with their neighboring pavement point cloud are taken as a whole, and the statistical features of roughness are used for quantitative judgement of potholes. Finally, 3D geometric features such as depth, projected area, length and width of potholes are automatically extracted from the point cloud. Experimental results demonstrate the effectiveness of the proposed method in detecting potholes within large-scale complex road scenes. In the measured data, the recall rate and accuracy rate of pothole detection reach 89.2% and 76.7%, respectively. The maximum relative deviation between extracted 3D geometric features and manually measured field results is only 9.4%. Overall, the proposed method offers a valuable technical reference for extracting pavement damage information, enabling accurate detection of road damage and precise evaluation of road conditions.