
Yujing Chai, Jie Ma, Hong Liu. Deep Graph Attention Convolution Network for Point Cloud Semantic Segmentation[J]. Laser & Optoelectronics Progress, 2021, 58(12): 1210016
- Laser & Optoelectronics Progress
- Vol. 58, Issue 12, 1210016 (2021)
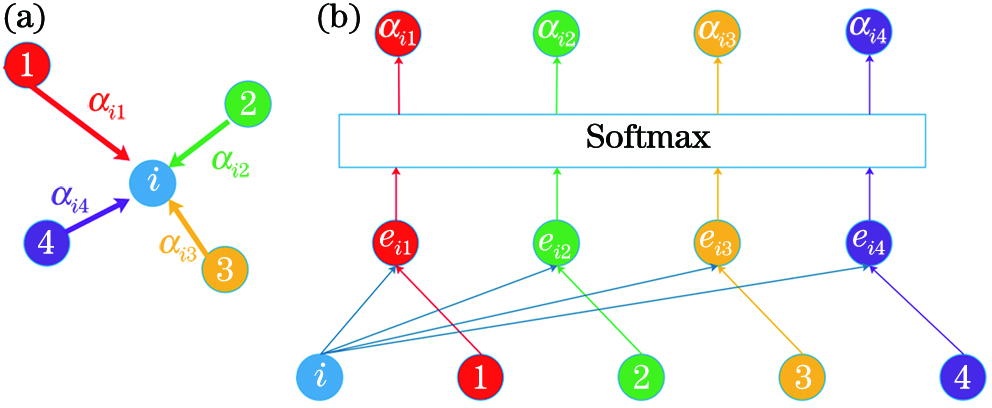
Fig. 1. Process of GAC. (a) Neighborhood points cluster toward center point; (b) calculation process of graph attention coefficient
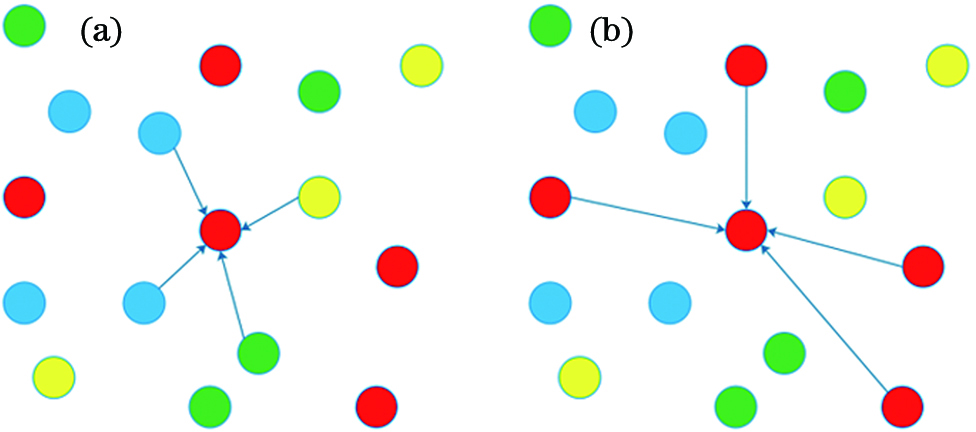
Fig. 2. Process of dynamic graph convolution. (a) Center point looks for neighborhood point in three-dimensional space; (b) center point looks for neighborhood point in feature space
Fig. 3. Structure of DeepGAC
Fig. 4. Qualitative results of semantic segmentation of S3DIS under different methods. (a) Original images; (b) ground truth; (c) ResGCN-28; (d) GAC; (e) ResGAC-28
|
Table 1. Semantic segmentation results of 6-fold cross validation method on S3DIS unit: %
|
Table 2. Test results of different methods in region 5 of S3DIS unit: %
|
Table 3. Test results for different aggregation modes
|
Table 4. Test results of spatial location information and characteristic attribute information
|
Table 5. Validity test results of residual join and dynamic graph convolution
|
Table 6. Test results of model parameter adjustment

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20