
Pengfei Wang, Weipeng Guan, Shangsheng Wen, Yongjian Xie, Yuxiang Wu, Meiqi Zhang. High Precision Indoor Visible Three-Dimensional Positioning System Based on Immune Algorithm[J]. Acta Optica Sinica, 2018, 38(10): 1006007
- Acta Optica Sinica
- Vol. 38, Issue 10, 1006007 (2018)
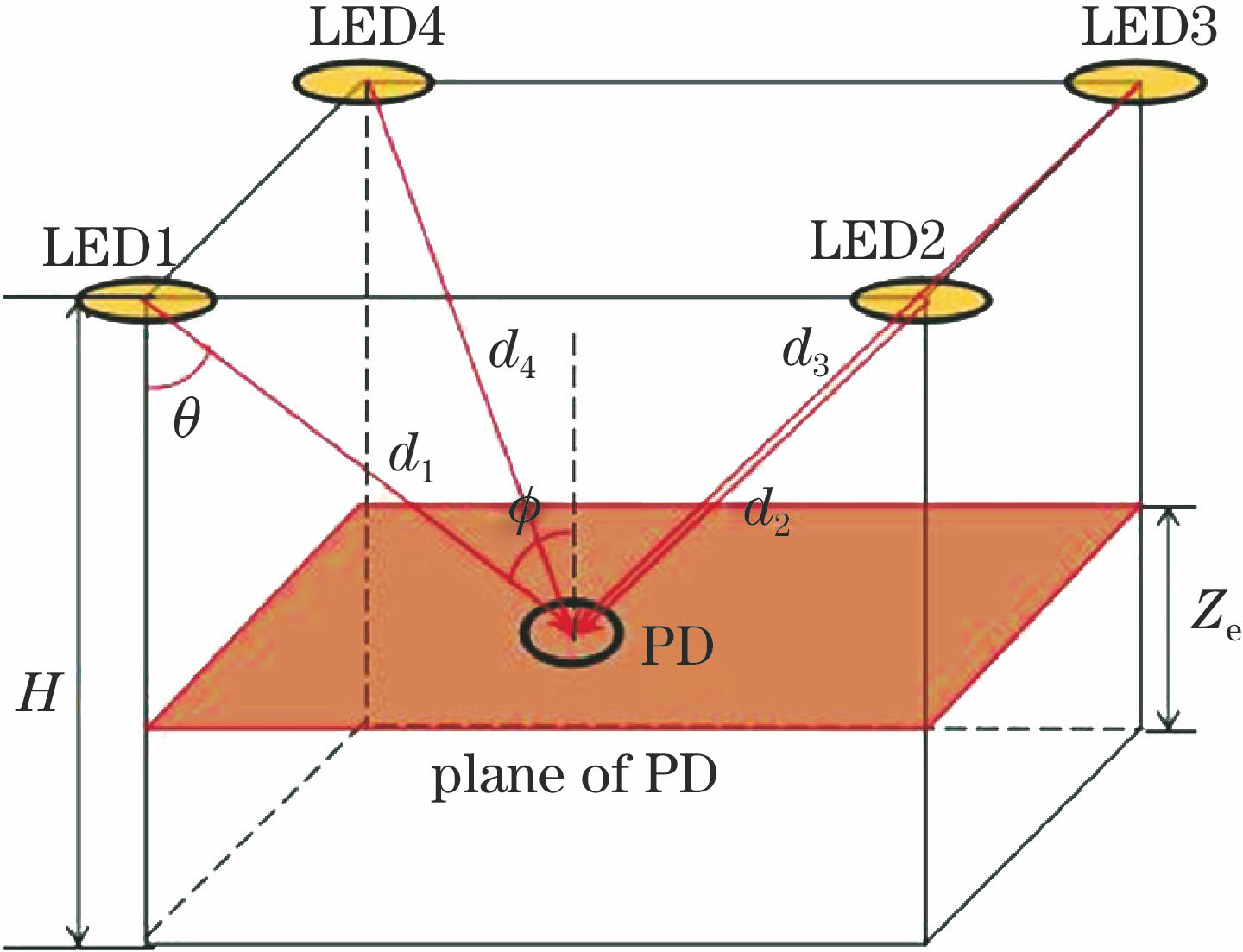
Fig. 1. Indoor visible light positioning system
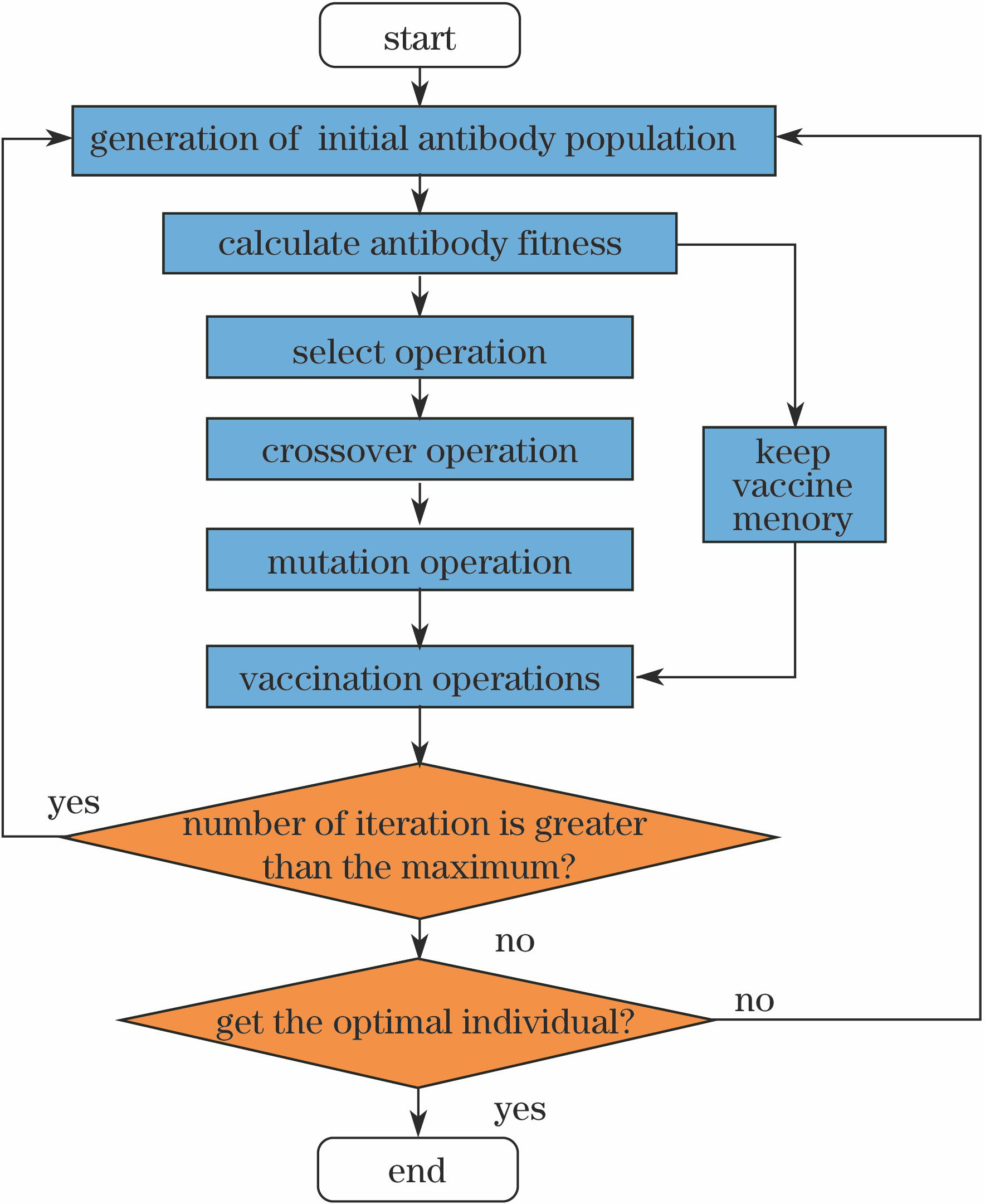
Fig. 2. Framework of 3-D positioning based on immune algorithm
Fig. 3. Convergence process of algorithm. (a) 20 iterations; (b) 40 iterations; (c) 60 iterations; (d) 80 iterations
Fig. 4. Distributions of the actual location points and the location points calculated by immune algorithm at different heights. (a) 0.25 m; (b) 0.50 m; (c) 0.75 m; (d) 1.00 m; (e) 1.25 m; (f) 1.50 m; (g) 1.75 m; (h) 2.00 m
Fig. 5. Three-dimensional positioning errors at different heights. (a) 0.25 m; (b) 0.50 m; (c) 0.75 m; (d) 1.00 m; (e) 1.25 m; (f) 1.50 m; (g) 1.75 m; (h) 2.00 m
Fig. 6. Mean error at different heights
Fig. 7. Histogram of positioning errors
Fig. 8. CDF curve of positioning errors
Fig. 9. Three-dimensional position in motion scene
Fig. 10. Horizontal view of positioning result
Fig. 11. Vertical view of positioning result
Fig. 12. Histogram of positioning error in motion scene
Fig. 13. CDF curve of positioning error in motion scene
|
Table 1. Simulation parameters of 3-D positioning system

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20