
Shun-Xing Tang, Ya-Jing Guo, Dai-Zhong Liu, Lin Yang, Xiu-Qing Jiang, Zeng-Yun Peng, Bao-Qiang Zhu. Single lens sensor and reference for auto-alignment[J]. High Power Laser Science and Engineering, 2018, 6(1): 010000e5
- High Power Laser Science and Engineering
- Vol. 6, Issue 1, 010000e5 (2018)
Abstract
Keywords
1 Introduction
In high-power laser systems, such as NOVA, OMEGA, NIF, and SG-II, an auto-alignment system is very important because thousands of mirrors exist in hundreds of meters of beam lines[
Auto-alignment processing loops always start with determining the current position and pointing angle of the beam, which requires a sensor in order to obtain the beam position displacement and pointing deviation angle from the reference (some type of mark). Second, the system must decide how much the mirror should be adjusted by means of analyzing the image acquired by the sensor. Then, the mirror is adjusted by driving motors for the corresponding steps, and the new beam position and pointing angle are verified by the sensor. This loop will stop when both the beam position and pointing angle meet the system requirements. Previous alignment methods typically required two optical sensors, one for the beam position and the other for its pointing angle. In certain situations, considering space or budget limitations, such as in outer space or vacuum chambers[
2 Setup of single lens alignment sensor and reference
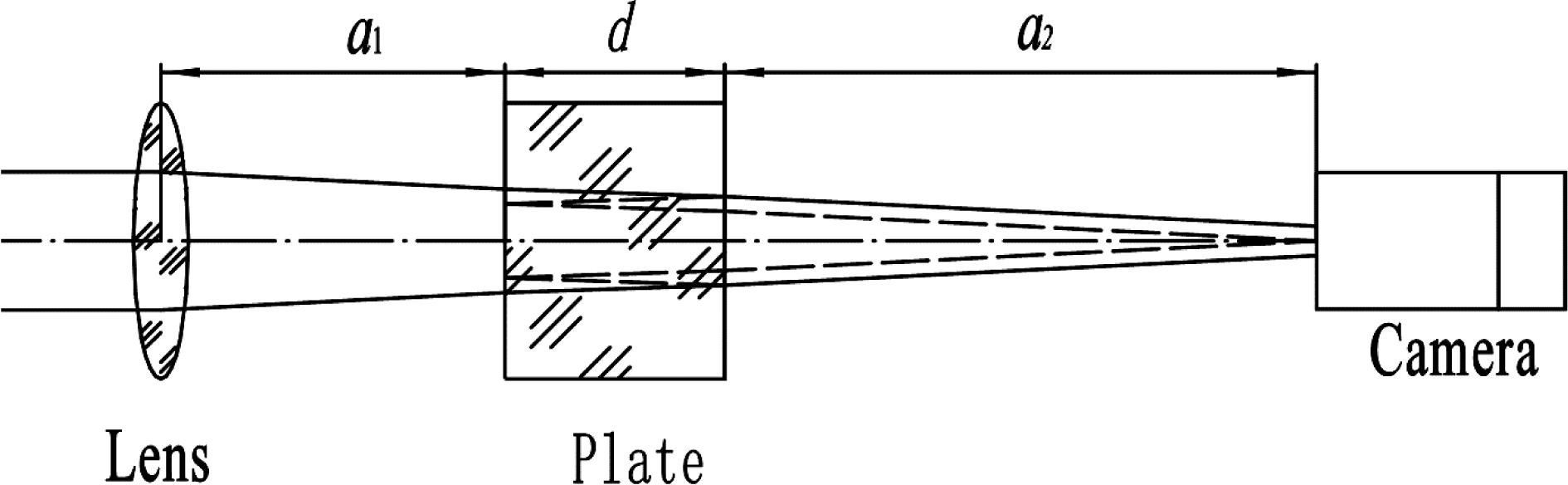
The single lens alignment sensor is designed on the basis of the ‘ghost image concept’, and consists of a lens, parallel plate, and camera (see Figure
Sign up for High Power Laser Science and Engineering TOC. Get the latest issue of High Power Laser Science and Engineering delivered right to you!Sign up now
Based on the matrix optics theory, we analyze the sensor operation. The transfer array from the lens to the camera for the original beam should be
Furthermore, the transfer array of the ghost beam should be
Taking the lens center and axis as the alignment reference, the optics array of the input laser beam should be written as
Camera image acquisition provides an image including both the near-field and far-field, and we can determine the input beam position and pointing angle from the image as follows:
3 Optical parameter analysis in the sensor
In order to perform alignment of a beam path, we need to know the beam aperture (
The correlation between the sensor parameters and the alignment concerned specifications is analyzed in this section. As illustrated in Figure
The near-field size on the camera is
| Item | Correlation | Symbol implication | |
|---|---|---|---|
| Contrast | |||
Table 1. Correlation between sensor parameters and alignment concerned specifications.
4 Beam alignment with single lens sensor
4.1 Experimental setup
As illustrated in Figure
The optics are roughly adjusted, as shown in Figure
4.2 Response function of alignment system
In order to prepare for the alignment task, the sensor will ‘teach’ the alignment mirrors how to carry out alignment work, or determine the response function of the alignment system:
With each element of the response array, taking the average of different adjustment directions, we obtain the response function for the horizontal direction as follows:
After determining the response array, we can establish how to drive the mirrors when we obtain an alignment image (near-field and far-field center displacement from reference) by the sensor.
4.3 Performance of sensor
As the mirror mount experiences a motor empty back problem vertically, while working effectively in the horizontal direction, which is not the most important issue, we simply carry out horizontal alignment to test the sensor’s performance.
First, the image records the initial beam position of the beam (Figure
The alignment accuracy is determined by both the controlling accuracy of the mirror mounts and sensor sensitivity. In the example discussed above, the mirror mount calibrated response is almost 1 pixel per step, which means that the controlling accuracy cannot be better than 1 pixel. Furthermore, the sensor cannot be better than 1 pixel, which is equal to
5 Conclusion
A single lens alignment sensor is designed on the basis of the ‘ghost image concept’. The working principle and performance analysis are demonstrated based on the theory of matrix optics. The design rules and alignment processing are defined, and an alignment example is carried out in order to demonstrate how the sensor works. The test results indicate that the sensor can operate effectively in the beam alignment process. The experimentally designed sensor performance is stable and can meet the alignment accuracy with approximately 0.5% for the position and
References
[1] T. R. Boehly, D. L. Brown, R. S. Craxton, R. L. Keck, J. P. Knauer, J. H. Kelly, T. J. Kessler, S. A. Kumpan, S. J. Loucks, S. A. Letzring, F. J. Marshall, R. L. McCrory, S. F. B. Morse, W. Seka, J. M. Soures, C. P. Verdon. Opt. Commun., 1–6, 133(1997).
[2] C. A. Haynam, R. A. Sacks, P. J. Wegner, M. W. Bowers, S. N. Dixit, G. V. Erbert, G. M. Heestand, M. A. Henesian, M. R. Hermann, K. S. Jancaitis, K. R. Manes, C. D. Marshall, N. C. Mehta, J. Menapace, M. C. Nostrand, C. D. Orth, M. J. Shaw, S. B. Sutton, W. H. Williams, C. C. Widmayer, R. K. White, S. T. Yang, B. M. Van Wonterghem. Appl. Opt., 16, 46(2007).
[4] G. Yanqi, C. Zhaodong, Y. Xuedong, M. Weixin, Z. Baoqiang, L. Zunqi. 11th Conference on Lasers and Electro-Optics Pacific Rim (CLEO-PR). Busan, South Korea, 1(2015).
[5] M. L. Andre. 2nd Annual International Conference on Solid State Lasers for Application to Inertial Confinement Fusion, 38(1996).
[6] L. Zunqi, W. Shiji, F. Dianyuan, Z. Jianqiang, Y. Yi, Z. Jian, C. Xijie, M. Weixin, Z. Dakui, S. Liqing, Z. Qingchun, X. Deyan, S. Weixing, C. Shaohe, C. Qinghao, P. Zengyun, L. Fengqiao, L. Liangyu, H. Guanlong, X. Zhenhua, T. Xianzhong. Chin. J. Lasers, 10B, 6(2001).
[7] E. S. Bliss, R. G. Ozarski, D. W. Myers, J. B. Richards, C. D. Swift, R. D. Boyd, R. E. Hugenberger, L. G. Seppala, J. Parker, E. H. Dryden. 9th Symposium on Engineering Problems of Fusion Research, 1242(1981).
[8] E. S. Bliss, S. J. Boege, R. D. Boyd, D. T. Davis, R. D. Demaret, M. Feldman, A. J. Gates, F. R. Holdener, C. F. Knopp, R. D. Kyker, C. W. Lauman, T. J. McCarville, J. L. Miller, V. J. Miller-Kamm, W. E. Rivera, J. T. Salmon, J. R. Severyn, S. K. Sheem, S. W. Thomas, C. E. Thompson, D. Y. Wang, M. F. Yoeman, R. A. Zacharias, C. Chocol, J. Hollis, D. Whitaker, J. Brucker, L. Bronisz, T. Sheridan. 3rd International Conference on Solid State Lasers for Application to Inertial Confinement Fusion, 285(1998).
[10] Y.-Q. Gao, B.-Q. Zhu, D.-Z. Liu, X.-F. Liu, Z.-Q. Lin. Appl. Opt., 8, 48(2009).
[11] J. D. Lindl, E. I. Moses. Phys. Plasmas, 5, 18(2011).
[12] D. Liu, R. Xu, D. Fan. Chin. Opt. Lett., 2, 92(2004).
[13] S. C. Burkhart, E. Bliss, P. Di Nicola, D. Kalantar, R. Lowe-Webb, T. McCarville, D. Nelson, T. Salmon, T. Schindler, J. Villanueva, K. Wilhelmsen. Appl. Opt., 8, 50(2010).
[14] K. Wilhelmsen, A. Awwal, G. Brunton, S. Burkhart, D. McGuigan, V. M. Kamm, R. Leach, R. Lowe-Webb, R. Wilson. Fusion Engng Design, 12, 87(2012).
[15] R. Krappig, R. Schmitt. Conference on Photonic Instrumentation Engineering IV, 11(2017).
[16] W. Wu, L. Bi, K. Du, J. Zhang, H. Yang, H. Wang. High Power Laser Sci. Eng., 5, e9(2017).
[17] M. Charles.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20