
Mingrui Lu, Chao Han, Fan Lu, Baorui Miao, Jikun Yang, Junjun Zha, Wenhan Sha. Adaptive Correlation Filtering Tracking Algorithm for Complex Scenes[J]. Laser & Optoelectronics Progress, 2022, 59(24): 2415004
- Laser & Optoelectronics Progress
- Vol. 59, Issue 24, 2415004 (2022)
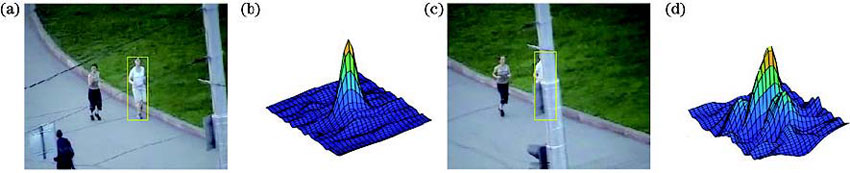
Fig. 1. Response diagrams corresponding to Joggle-1 sequence. (a) No occlusion image in frame 4; (b) response diagram of frame 4;(c) occlusion image in frame 49; (d) response diagram of frame 49

Fig. 2. Flowchart of the proposed algorithm
Fig. 3. Influence of different parameters on tracker performance. (a) Parameter ζ; (b) parameter τ; (c) parameters η1 and η2
Fig. 4. Precision and success rate of different feature weighted methods. (a) Precision; (b) success rate
Fig. 5. Scale changes of different algorithms under three groups of different video sequences. (a) Blurcar2; (b) Doll; (c) Carscale
Fig. 6. ΔEAPC value and changes of each frame under the Joggle sequences. (a) Joggle-1; (b) Joggle-2
Fig. 7. CLE changing between two sets of videos. (a) Basketball; (b) Faceocc1
Fig. 8. Precision and success rate of seven algorithms on OTB50 dataset. (a) Precision; (b) success rate
Fig. 9. Precision and success rate of seven algorithms on OTB2015 dataset. (a) Precision; (b) success rate
Fig. 10. Comparison of seven algorithms on different video sequences. (a) Box; (b) Dragonbaby; (c) Bird2; (d) Panda; (e) Carscale; (f) Soccer; (g) Tiger2
|
Table 1. Three weighted ratios of multi-feature fusion
|
Table 2. Index of the proposed algorithm under three groups of scale sequences
|
Table 3. Result comparison of search area algorithms
|
Table 4. Precision of seven target tracking algorithms at 11 different challenge attributes
|
Table 5. Success rate of seven target tracking algorithms at 11 different challenge attributes
| ||||||||||||||||||||||||||
Table 6. Running speed of seven target tracking algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20