
Yan Li, Miao Wu, Weiji He, Qian Chen. Depth Estimation of Single Photon Lidar in Complex Scenes[J]. Laser & Optoelectronics Progress, 2023, 60(10): 1011004
- Laser & Optoelectronics Progress
- Vol. 60, Issue 10, 1011004 (2023)
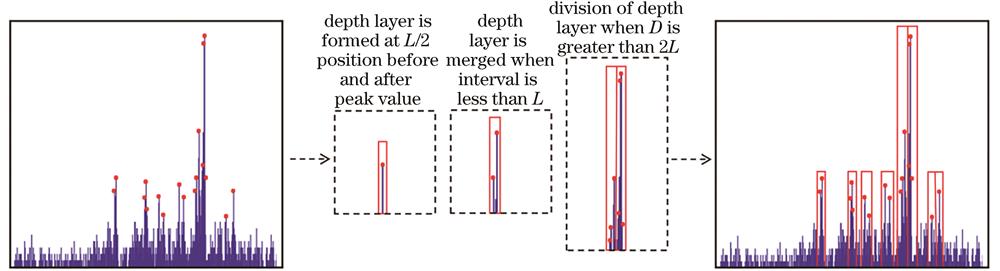
Fig. 1. Multi depth layer division method
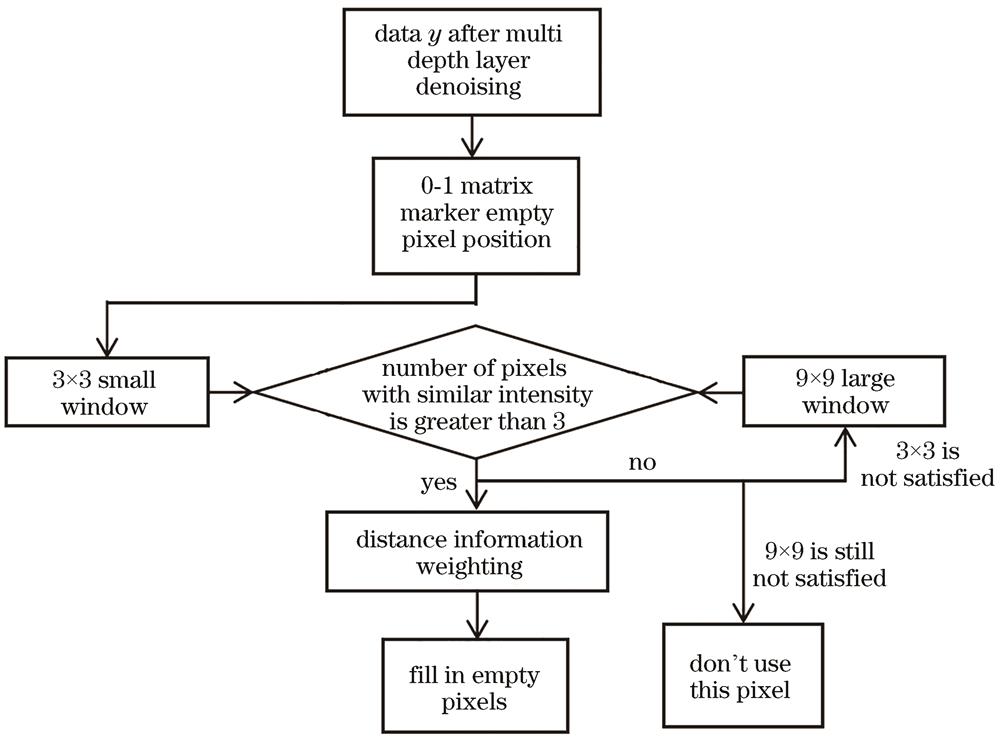
Fig. 2. Weighted filling method for empty pixels
Fig. 3. Calculation method of null pixel signal set
Fig. 4. Depth maps of simulation experiment.(a) Reference depth map of simulation scene; (b)-(f) depth maps estimated by MLE, PCA, SPISTA, SHIN, and proposed method, respectively
Fig. 5. Schematic of long-range single-photon lidar system
Fig. 6. Depth maps of complex scene 1.(a) Visible band map of complex scene 1; (b) reference depth map; (c)-(g) depth maps estimated by MLE, PCA, SPISTA, SHIN, and proposed method, respectively
Fig. 7. Depth maps of complex scene 2. (a) Visible band map of complex scene 2; (b) reference depth map; (c)-(g) depth maps estimated by MLE, PCA, SPISTA, SHIN, and proposed method, respectively
Fig. 8. RSNR of depth maps estimated by different methods at different PPP levels
|
Table 1. RSNR of different methods on simulation data
|
Table 2. RSNR of different methods on complex scene 1
|
Table 3. RSNR of different methods on complex scene 2

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20