
Pang Zhengya, Zhou Zhifeng, Wang Liduan, Ye Juelei. Improved Three-Dimensional Reconstruction Algorithm for Point Cloud Data[J]. Laser & Optoelectronics Progress, 2020, 57(2): 21102
- Laser & Optoelectronics Progress
- Vol. 57, Issue 2, 21102 (2020)
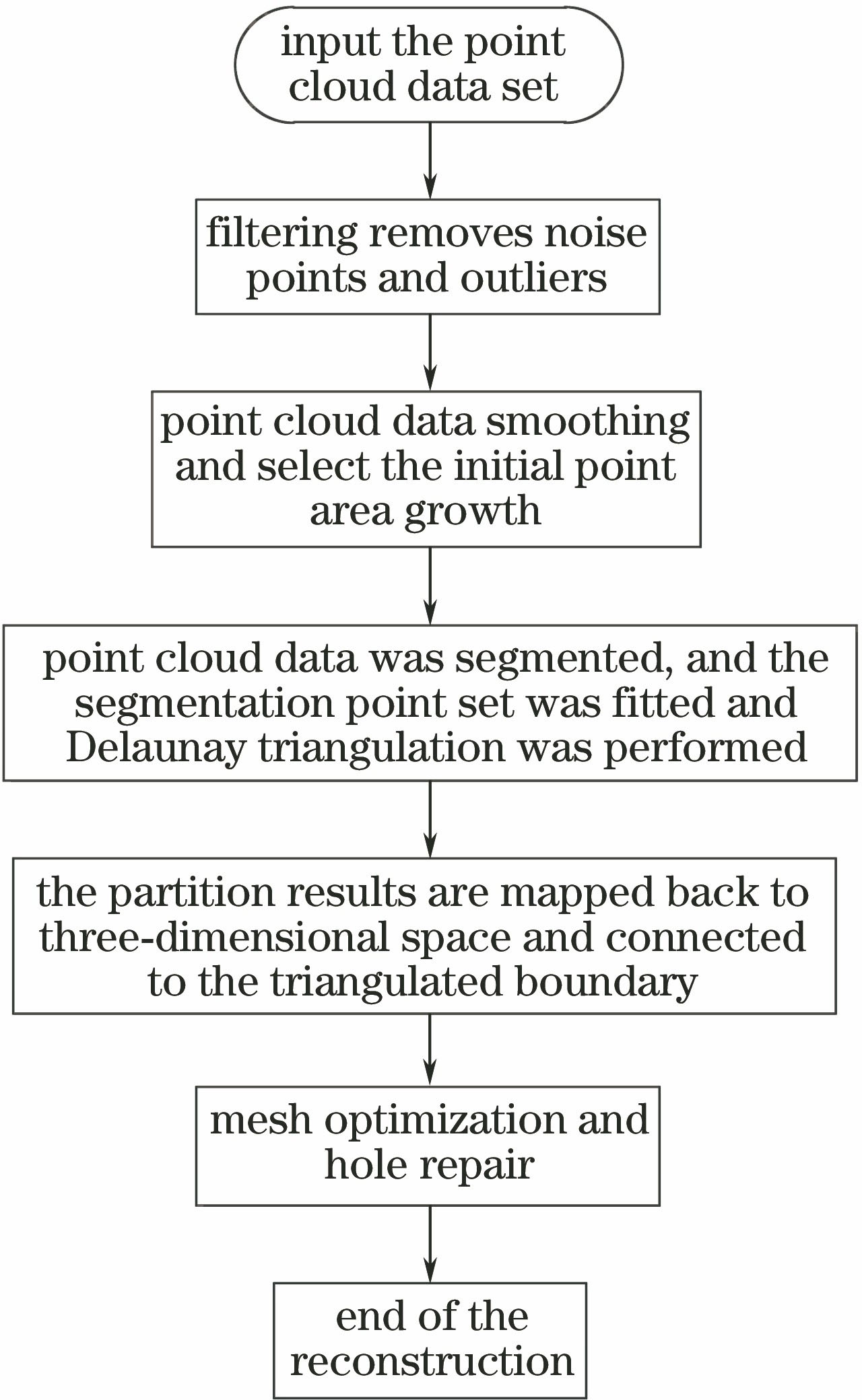
Fig. 1. Point cloud reconstruction process
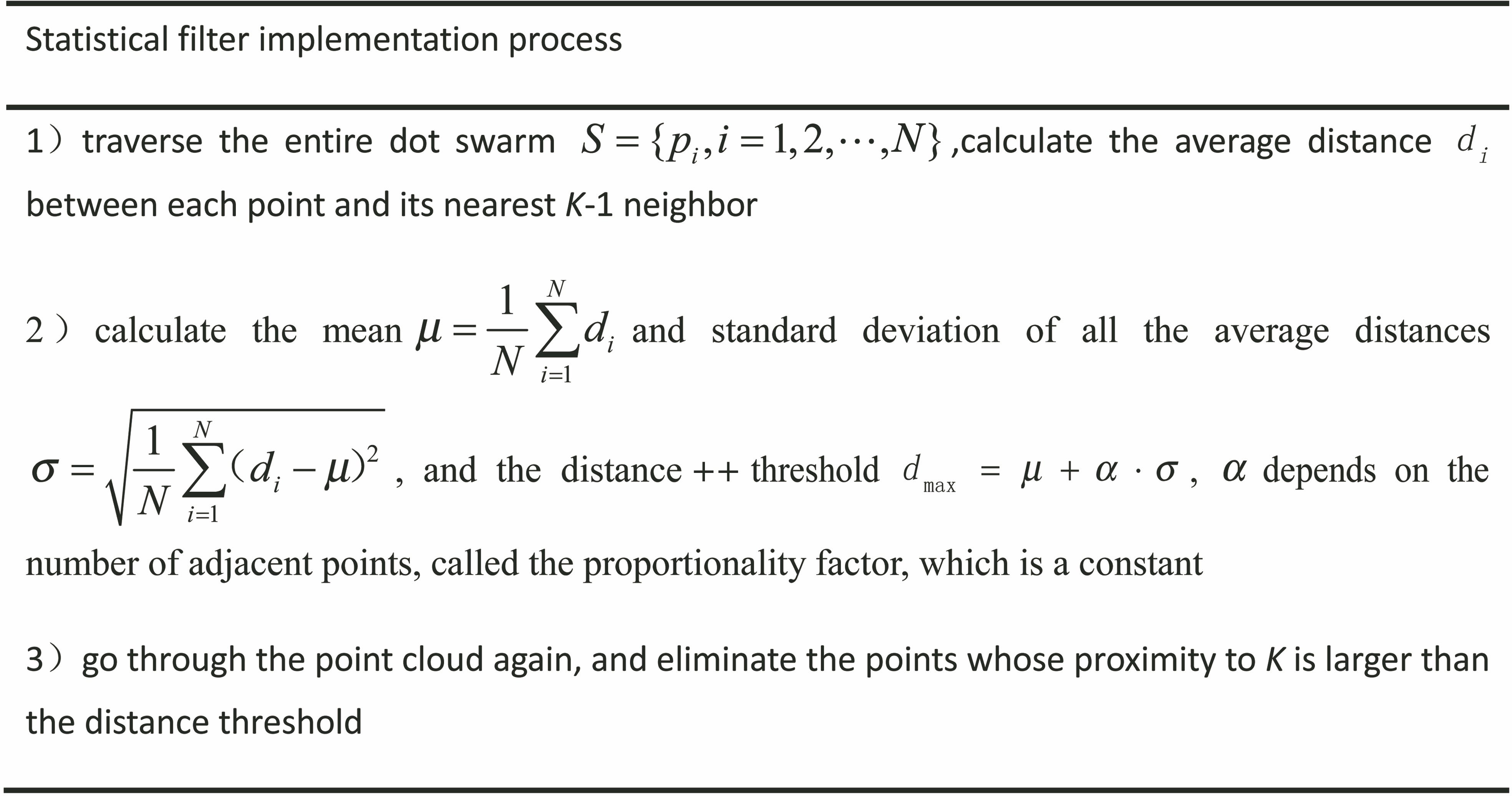
Fig. 2. Implementation process of statistical filter
Fig. 3. Point cloud state division and regional growth diagram
Fig. 4. Zone growth pseudocode
Fig. 5. Analysis on time complexities of three algorithms
Fig. 6. Dragon reconstruction based on three algorithms. (a) Based on proposed algorithm; (b) based on Delaunay algorithm; (c) based on Poisson algorithm
Fig. 7. Bunny point cluster reconstruction
Fig. 8. Horse point cluster reconstruction
Fig. 9. Construction point cluster reconstruction
Fig. 10. Table point cluster reconstruction
|
Table 1. Comparison of number of point clouds before and after denoising of different point clouds
|
Table 2. Comparison of reconstruction time of different point cloudss

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20