
Chaoqun Song, Sixiang Xu, Yu Yang, Mengqi Hua. Binocular Vision Measurement Method Using Improved FAST and BRIEF[J]. Laser & Optoelectronics Progress, 2022, 59(8): 0810013
- Laser & Optoelectronics Progress
- Vol. 59, Issue 8, 0810013 (2022)
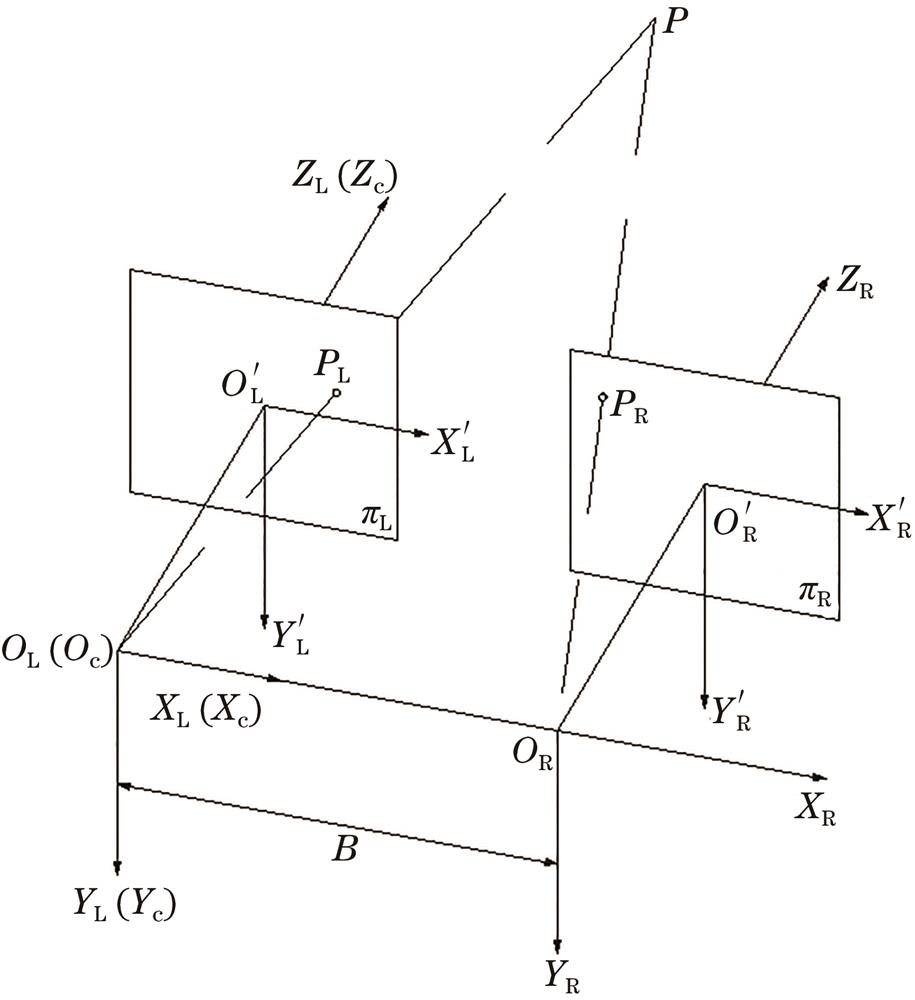
Fig. 1. Diagram of binocular stereo imaging principle
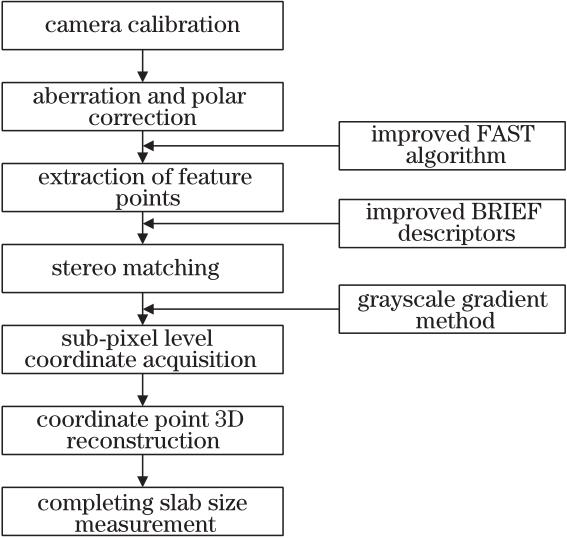
Fig. 2. Flow chart of slab size measurement
Fig. 3. Center of the circle in FAST algorithm and its circumference with 16 pixels
Fig. 4. Corner detection template
Fig. 5. Comparison of the slab model before and after correction. (a) Before correction; (b) after correction
Fig. 6. Comparison of corner detection of the slab model. (a) Traditional FAST; (b) proposed improved FAST
Fig. 7. Comparison of corner detection of Blox picture. (a) Traditional FAST; (b) proposed improved FAST
Fig. 8. Matching diagram
Fig. 9. Final matching point pairs
Fig. 10. Calculating sub-pixel corner points
Fig. 11. Feature point matching. (a) SIFT algorithm; (b) traditional FSAT+BRIEF; (c) algorithm in Ref.[10]; (d) proposed algorithm
|
Table 1. Calibration result of internal parameters in binocular system
|
Table 2. Calibration result of external parameters in binocular system
|
Table 3. Comparison of detection results of two FAST algorithms
|
Table 4. Matching point coordinates
|
Table 5. Size measurement results of the slab model
|
Table 6. Comparison results of the four algorithms
|
Table 7. Slab measurement accuracy analysis

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20