
Zhi Zhao, Yanxin Ma, Ke Xu, Jianwei Wan. Optimized Scalable and Learnable Binary Quantization Network for LiDAR Point Cloud[J]. Acta Optica Sinica, 2022, 42(12): 1212005
- Acta Optica Sinica
- Vol. 42, Issue 12, 1212005 (2022)
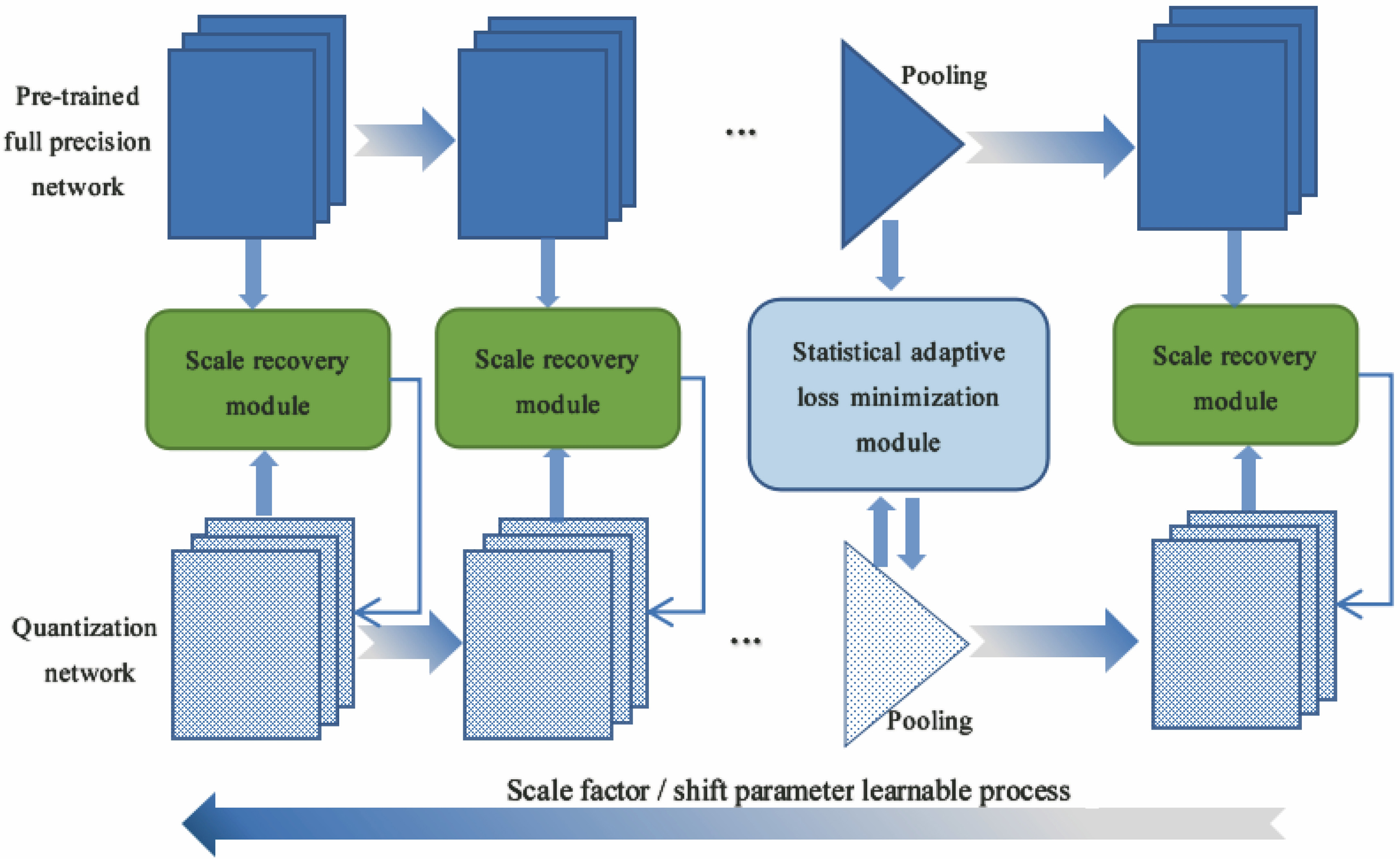
Fig. 1. General framework for point cloud learnable binary quantization network model
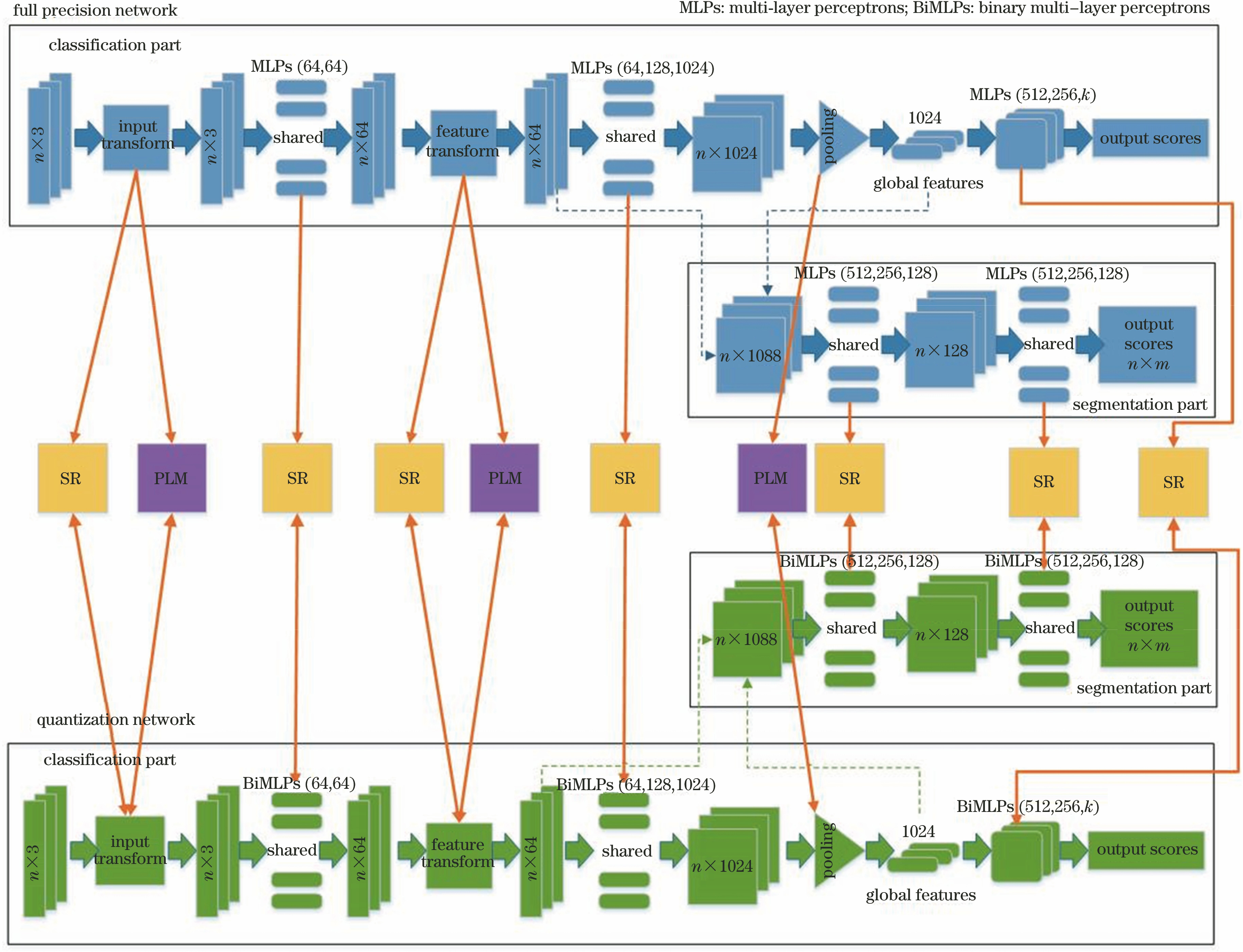
Fig. 2. Learnable binary quantization network model of PointNet
Fig. 3. Gene-algorithm based binary quantization scale factor recovery
Fig. 4. Optimal search of scale factor based on gene-algorithm optimization
Fig. 5. Curves of feature entropy before and after pooling. (a) n=5; (b) n=20; (c) n=50; (d) n=100
Fig. 6. Minimization of statistically self-adaptive pooling loss. (a) Quantitative network self-regulation; (b) statistical knowledge transfer regulation of full precision network
Fig. 7. Comparison of adjusted feature probability distributions. (a) Feature distribution comparison 1; (b) feature distribution comparison 2; (c) feature distribution comparison 3
Fig. 8. Learnable training process
Fig. 9. Comparison of optimized pooling. (a) Quantization network self-adjustment; (b) full-precision network transfer adjustment
Fig. 10. Training performance comparison. (a) Comparison result 1; (b) comparison result 2; (c) comparison result 3
Fig. 11. Scaling factor searching based on gene-optimized algorithm. (a) Iterative searching process; (b) feature maps produced by binary conv layer
Fig. 12. Comparison of different channel feature maps of different binary convolution layers (sub-figures from left to right are 3 corresponding channels in sequence). (a) Feature maps of different channels of 1st binary convolution layer; (b) feature maps of different channels of 2nd binary convolution layer; (c) feature maps of different channels of 3rd binary convolution layer
Fig. 13. Comparison of feature maps of binary convolution layers at different locations (sub-figures from left to right are 3 convolution layers in sequence). (a) Feature map of location 1; (b) feature map of location 2; (c) feature map of location 3
Fig. 14. Feature maps of pooling. (a) Activation features before pooling; (b) pooling features of non-optimized binary network; (c) pooling features of binary network with pooling optimization; (d) pooling features of binary network with scaling and pooling optimization
Fig. 15. Partial results of part segmentation. (a) Knife; (b) motorbike; (c) lamp
Fig. 16. Partial results of semantic segmentation. (a) Area 1_Conference Room 2; (b) Area 1_Office Room 2; (c) Area 1_Hallway 1
Fig. 17. Overall performance comparisons. (a) Performance comparison 1; (b) performance comparison 2
Fig. 18. Inference time comparisons
|
Table 1. Comparison of binary quantization algorithms
|
Table 2. Comparison of binary quantization methods without optimized pooling
|
Table 3. Comparison of binary quantization methods with optimized pooling
|
Table 4. Comparison of typical binary quantization methods
|
Table 5. Precision of part segmentation%
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 6. Semantic segmentation experiment results%
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 7. Comparative experiment results for typical network models
|
Table 8. Complexity comparison results

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20