
Hui Tang, Mingquan Zhou, Guohua Geng. Point Cloud Registration Algorithm Based on Extended Point Feature Histogram Feature[J]. Laser & Optoelectronics Progress, 2019, 56(24): 241503
- Laser & Optoelectronics Progress
- Vol. 56, Issue 24, 241503 (2019)
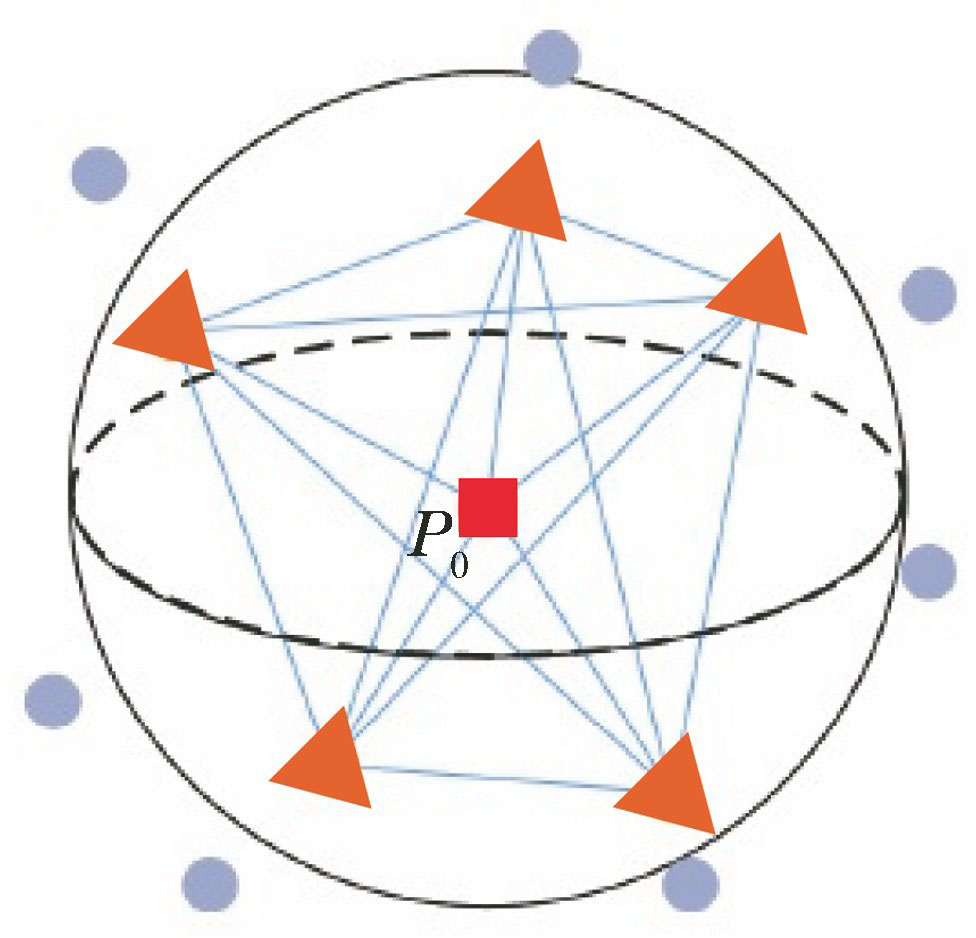
Fig. 1. Effected region of PFH calculation for feature point p 0
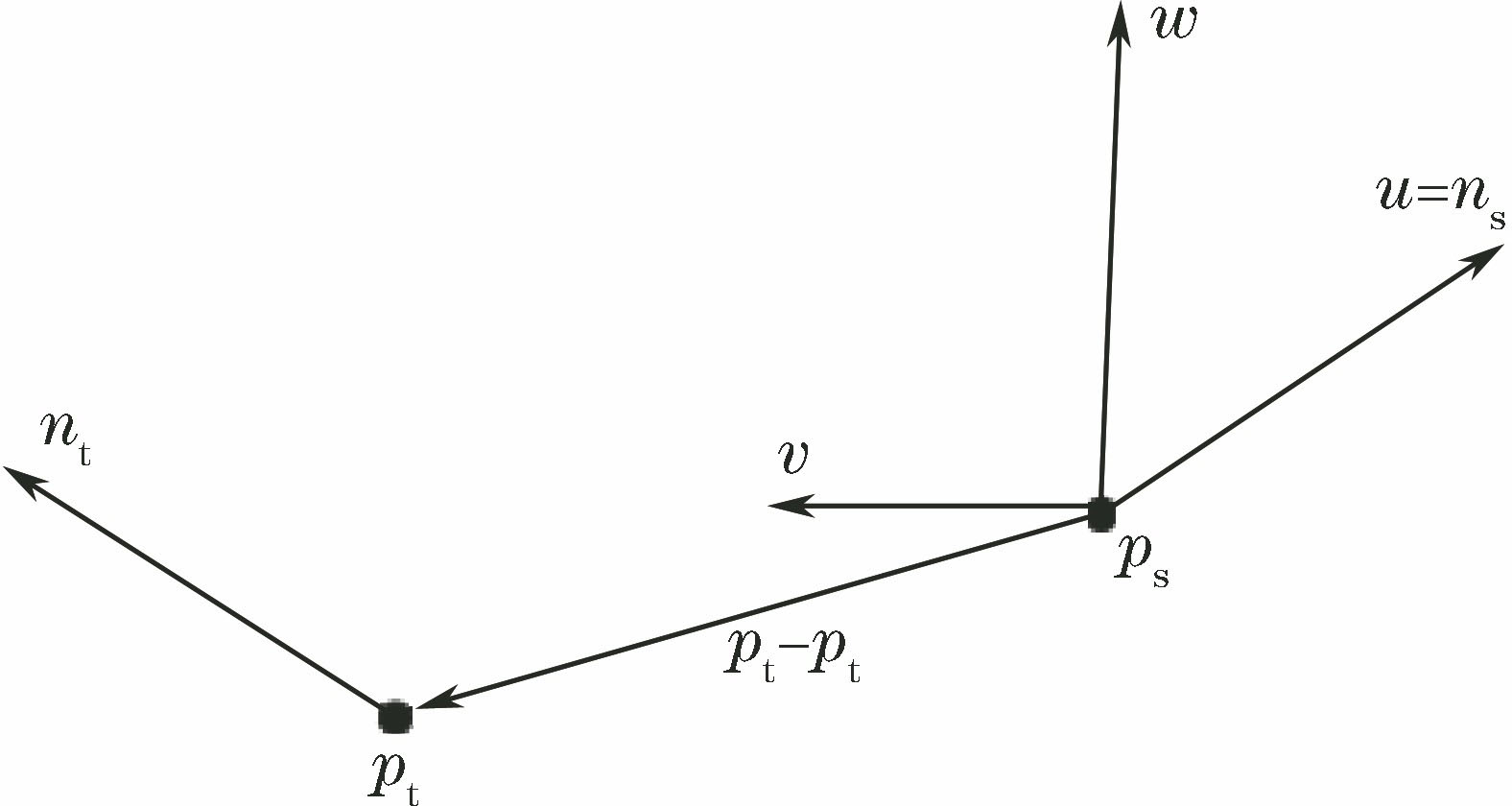
Fig. 2. Schematic of Darboux frame
Fig. 3. Diagram of 3D spherical grid
Fig. 4. Experimental results of the proposed method. (a)(d)(g)(j)(m) Original pieces; (b)(e)(h)(k)(n) results of rough matching based on SAC-IA algorithm; (c)(f)(i)(l)(o) results of fine matching based on improved k -d tree algorithm
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Operating parameters of the proposed algorithm
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Comparison of operating parameters of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20