
Kai Zhao, Youchun Xu, Yongle Li, Rendong Wang. Large-Scale Scattered Point-Cloud Denoising Based on VG-DBSCAN Algorithm[J]. Acta Optica Sinica, 2018, 38(10): 1028001
- Acta Optica Sinica
- Vol. 38, Issue 10, 1028001 (2018)
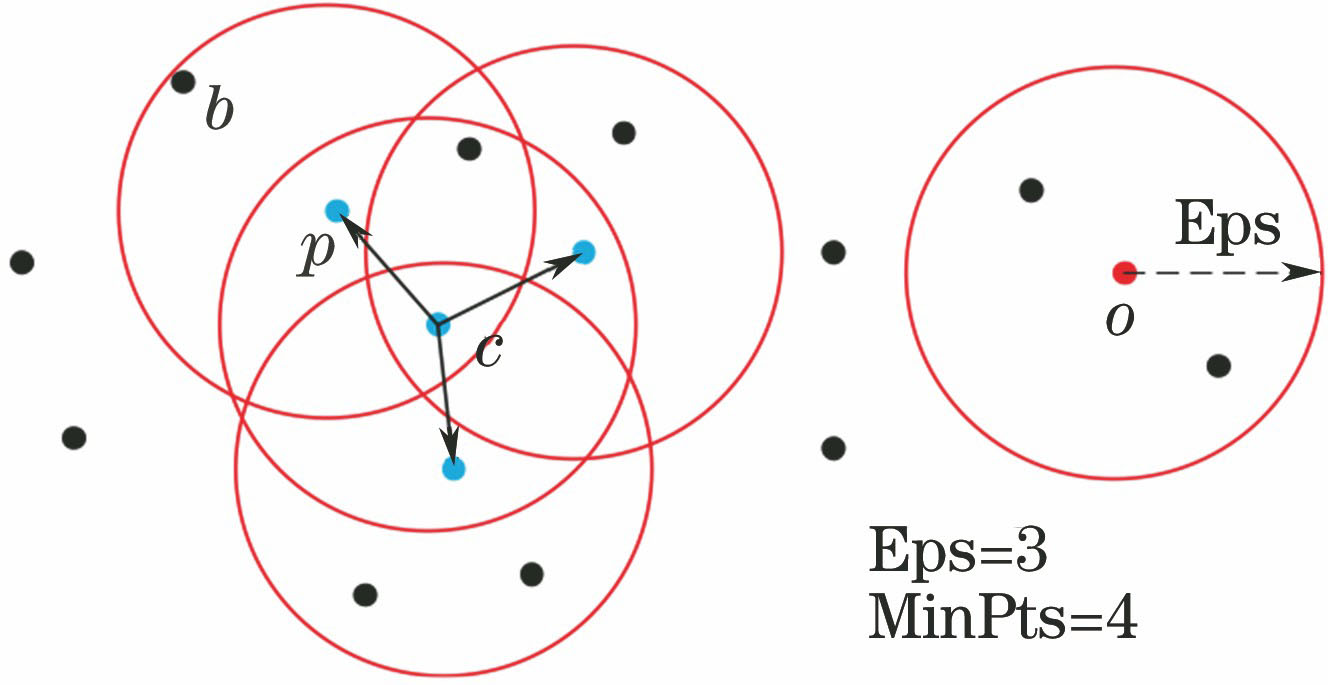
Fig. 1. Core idea of DBSCAN algorithm
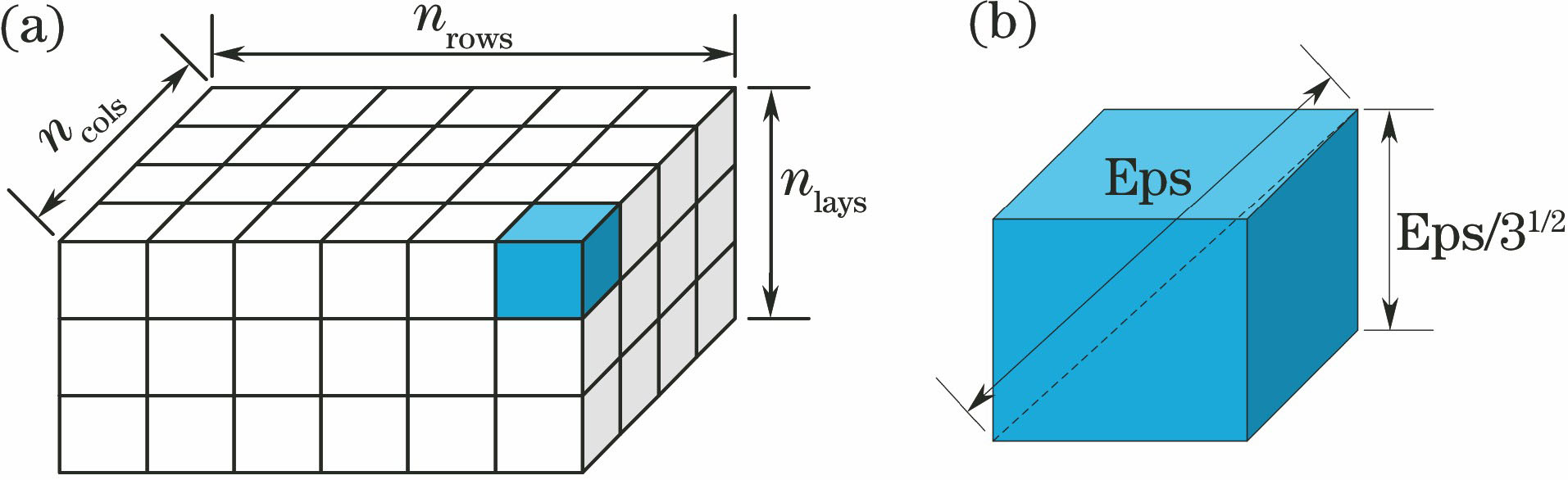
Fig. 2. Dividing a three-dimensional voxel grid. (a) Three-dimensional voxel grid; (b) voxel cell
Fig. 3. Two-dimensional schematic of a layer of a voxel grid
Fig. 4. Simplified example of a merged cluster
Fig. 5. Original point-cloud
Fig. 6. Results using statistical outlier removal algorithm.(a) MeanK=10; (b) MeanK=30; (c) MeanK=50
Fig. 7. Results using radius outlier removal algorithm. (a) MinNeighbors=5; (b) MinNeighbors=10; (c) MinNeighbors=15
Fig. 8. Denoising results using VG-DBSCAN algorithm. (a) Eps=1, MinPts=10; (b) Eps=1, MinPts=15; (c) Eps=1, MinPts=20
Fig. 9. Local denoising results using VG-DBSCAN algorithm. (a) Before denoising; (b) after denoising
Fig. 10. Point-cloud-matching results after denoising. (a) Before matching; (b) after matching
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Denosing results using three algorithms
| |||||||||||||||||||
Table 2. Point-cloud-matching results before and after denoising

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20