
Changyong Zhang, Liang Han. Obstacle Detection of LiDAR Based on Optimized DBSCAN[J]. Laser & Optoelectronics Progress, 2022, 59(12): 1228008
- Laser & Optoelectronics Progress
- Vol. 59, Issue 12, 1228008 (2022)
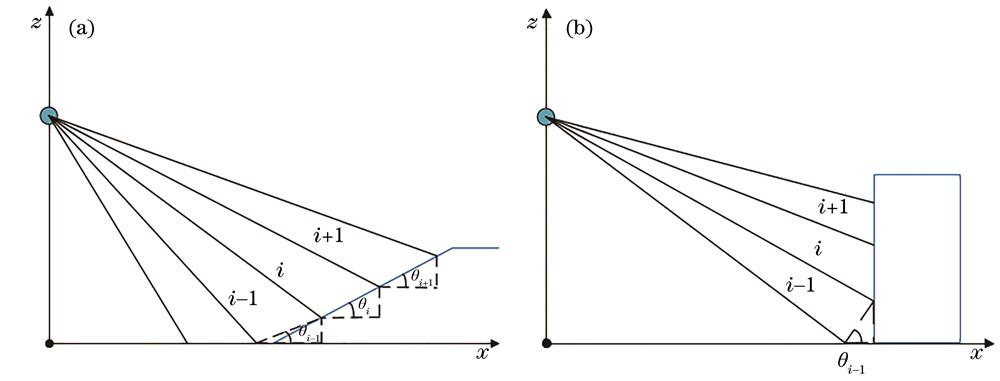
Fig. 1. Schematic of ground points in different scenes. (a) Schematic of slope ground point determination; (b) schematic of non-ground point judgment
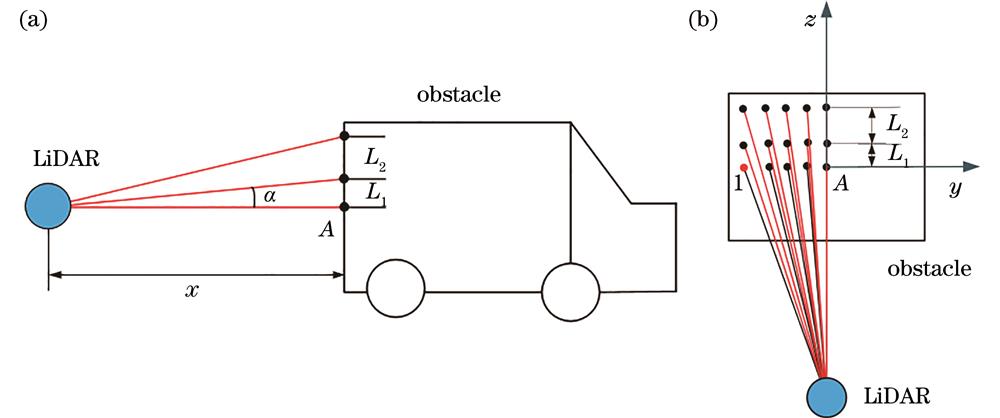
Fig. 2. Schematic of 3D LiDAR scanning. (a) Side view of 3D LiDAR scanning; (b) front view of 3D LiDAR scanning
Fig. 3. Flowchart of obstacle detection
Fig. 4. Selection of representative points
Fig. 5. ROI data extraction and ground segmentation results. (a) Lane line detection; (b) ROI extraction; (c) ground segmentation
Fig. 6. Multi-distance and multi-obstacle plane scene detection experiment. (a) Data acquisition scenarios; (b) effect of traditional DBSCAN algorithm; (c) effect of algorithm in Ref. [9]; (d) effect of proposed algorithm
Fig. 7. Multi-distance and multi-obstacle slope scene detection experiment. (a) Data acquisition scenarios; (b) effect of traditional DBSCAN algorithm; (c) effect of algorithm in Ref. [9]; (d) effect of proposed algorithm
|
Table 1. Reflection intensity of different materials
|
Table 2. Performance comparison of traditional DBSCAN algorithm, Ref. [9] algorithm, and proposed algorithm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20