
Xuesong Xu, Yu Zeng. Visual Simultaneous Localization and Mapping Algorithm Based on Dynamic Target Detection[J]. Laser & Optoelectronics Progress, 2021, 58(16): 1615003
- Laser & Optoelectronics Progress
- Vol. 58, Issue 16, 1615003 (2021)
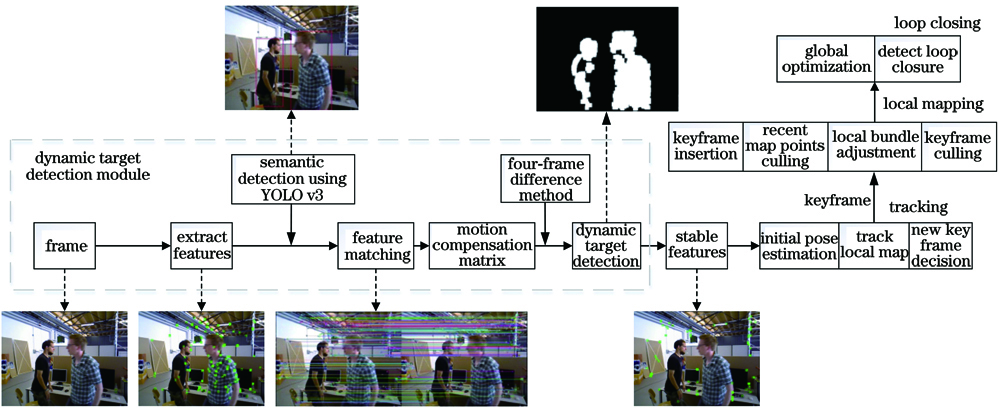
Fig. 1. Flow chart of our algorithm
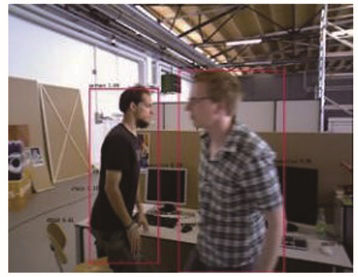
Fig. 2. Detection results of the moving target
Fig. 3. Matching results of feature points in static region
Fig. 4. Detection results of dynamic targets. (a) Two-frame difference method; (b) four-frame difference method; (c) noise filtering; (d) morphological processing; (e) segmentation result
Fig. 5. Result of dynamic target detection when the image is blurred. (a) Blurred image; (b) binary image; (c) target detection result; (d) optimized binary image; (e) optimized target detection result
Fig. 6. Feature point extraction results of different algorithms. (a) Original image; (b) feature points extracted by ORB-SLAM2 algorithm; (c) dynamic targets detected by our algorithm; (d) feature points extracted by our algorithm
Fig. 7. Detection results of different algorithms. (a) Original image; (b) YOLO v3 algorithm; (c) YOLO v3+ORB-SLAM2 algorithm; (d) our algorithm
Fig. 8. Trajectories of different algorithms. (a) ORB-SLAM2; (b) ORB-SLAM2+YOLO v3 algorithm; (c) our algorithm
|
Table 1. RMSE of ATE with different algorithms unit: m

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20