Abstract
Vertical stratification of the atmospheric boundary layer can hinder or change the vertical and horizontal transmission of energy, momentum, moisture, and trace substances. Therefore, the boundary layer height is particularly important for atmospheric research. The continuous changes in boundary layer height throughout the day in time cannot be obtained based on the sounding data. Further, the aerosol content gradient at the top of the boundary layer is not obvious, so the boundary layer height cannot be accurately given. In this paper, based on the water vapor mixing ratio data of Raman lidar, the boundary layer height is inverted by the slope method and the Dougls-Peucker (DP) algorithm, and the results are compared with the sounding data. The results show that the two are in good agreement.OCI Scodes 010.3640; 010.7340; 010.0280
1 引言
大气中的不确定区域是最接近地面的边界层,其直接受到地球表面的影响,Stull[1]认为大气的边界层是地表面强迫的响应时间不超过1 h的大气层。大气边界层也称为行星边界层(PBL),PBL的垂直分层对大气-地球圈层的相互作用具有重要影响,其中地球圈层包括生物圈、水圈和冰冻圈。边界层的状态对地球与大气之间的交换过程至关重要,因为边界层的分层可以阻止或改变能量、动量、湿气或微量物质的垂直和水平传输。边界层高度在晴朗天气下一般表现为日出后缓慢增大,日落后缓慢降低,其演变(尤其是对流边界层)直接影响中尺度天气过程,如空气污染物的传输和扩散以及电磁波在湍流大气中的传播等。为了避免混淆,将由湍流而产生的对流边界层称为混合层。然而,目前气候模型难以正确表征边界层参数和昼夜周期变化过程。通过创建边界层的相关参数(如稳定性类别、边界层及其深度)来提高科研学者对气候模型的理解,因此垂直分层的检测是研究边界层的主要任务之一,本文主要的研究内容是探测边界层的高度[1-7]。
测量大气边界层参数的设备有很多种,最常用的是气象观测塔。气象观测塔可以同时测量风速、风向、温度、湿度和压力等参数,但是气象观测塔的高度有限,不能覆盖整个边界层。无线电探空仪可以探测这些参数,但是由于其成本的原因,无线电探空仪一天只能发送几次,也就是说,无线电探空仪无法连续探测大气边界层参数,并且垂直分辨率有限,但其经常被用作参考方法之一。雷达探测是常用的边界层探测技术,通常探测风、降水和云系。随着科学技术的发展,激光雷达越来越适用于探测大气边界层的相关参数,即米散射激光雷达可探测气溶胶参数、多普勒激光雷达可探测风场参数以及拉曼激光雷达可探测水汽含量和温度等。自1960年以来,科研学者根据米散射激光雷达数据提出了多种方法来探测大气参数。Klett和Fernald[8-9]分别提出了两种方法,这两种方法统称为Klett-Fernald方法。在此基础上,越来越多的方法可以反演PBL高度,如对后向散射强度以及其他变量求解一阶导数和二阶导数等。Luo等[10-11]指出了尽管基于气溶胶的方法在海洋上表现良好,但在陆地上的很多情况下边界层顶的气溶胶含量梯度不明显,所以通常在陆地上无法提供可靠的边界层高度,因此本文使用拉曼激光雷达探测的水汽数据来反演大气边界层高度,并与探空数据进行对比。
2 数据来源与算法
2.1 数据来源
实验使用的拉曼激光雷达水汽数据来自SGP(Southern Great Plains)站点,其由分布在美国的俄克拉荷马州中北部(北纬36°36'18″,北纬97°29'6″,海拔为318m)和堪萨斯中南部的原位仪器和遥感仪器组成。SGP站点自1992年开始运营,2016年SGP添加了仪器,改善在边界层中捕获温度、风和相对湿度的能力,并改进拉曼激光雷达和气溶胶观测系统。SGP站点是唯一存在且连续运行的站点[12-13],为了获得常规的PBL高度,所以选择SGP站点中使用拉曼激光雷达探测的水汽数据。SGP站点使用的拉曼激光雷达的发射波长为355nm, 氮气通道为387nm,水汽通道为408nm,具体参数如表1所示[14],其中WFOV为宽视场,NOFV为窄视场。
| Parameter | Content |
|---|
| Laser | Tripled Nd∶YAG |
| Wavelength/nm | 355 |
| Pulse energy/mJ | 300--400 |
| Pulse repetition frequency/Hz | 30 |
| Beam diameter/cm | 13 (~0.1mrad divergence) |
| Bandwidth/cm-1 | ~2 |
| Filter transmission/% | 30--40 |
| WFOV/mrad | 2 |
| NFOV/mrad | 0.3 |
| Datastream | Sgpdlfptc1.b1 |
Table 1. Raman lidar related parameters at SGP site[14]
2.2 阈值法、导数法与理查森数方法
Melfi等[15]和Boers等[16]采用了简单的信号阈值法来判断边界层高度并选取合适的阈值,当大气中物质的含量小于阈值时,此时高度就是边界层高度。尽管这种方法非常简单,但是需要选取恰当的阈值才能有很好的效果[17]。实验所使用的水汽混合比数据就可以采用阈值法来寻找边界层高度,首先选取某一水汽混合比作为阈值,随着高度的增加,水汽混合比一般在近地面的变化较小,但是接近混合层顶会急剧下降,当某一高度的水汽混合比首次小于阈值时,此高度就是边界层高度。该方法的缺点是很难选择合适的阈值以适应长时间的反演,如冬天和夏天的水汽含量相差很大,甚至在一天内因为气流的影响,水汽含量也有很大差别。不恰当的阈值会导致选取的边界层高度过高或者过低,但是阈值法的处理过程简单,当没有其他更优的算法时,此方法可以作为备选方法之一。一般情况下阈值法是非常适用的,但是不同天气下寻找的阈值不同,而且反转层的变化比较缓慢,则会造成很大误差。
Hayden等[18]对光学后向散射强度(BI)求解一阶导数的最小值(HGM),其所在高度即为边界层所在的高度。设激光雷达探测到距离为Z处的光学后向散射强度为B,其一阶导数的最小值所在的高度为hGM,表达式为
如果是气溶胶数据,还可以求解二次导数,则寻找到的最小值即为边界层顶所在的高度,此方法一般称为拐点(IPM)法,此时高度记为
;也可以先求对数再求导,然后寻找到的最小值即为边界层顶所在的高度,此方法称为对数梯度最小(LGM)法,此时高度记为
Sicard等[17]对以上方法分别进行了分析。一般晴朗天气下使用导数法可以很好地找到边界层高度,但是当边界层有扰动时,往往会有几个类似的极小值,此时不能准确找到边界层高度。相对于阈值法,导数法选择的边界层高度更直观稳定一些。
在对流大气的条件下,当存在湍流时,理查森数(RI)方法被认为是最可靠的方法之一[11]。RI方法确定的对流边界层高度是RI第一次小于临界值(0.25)的高度[1,11,19],而且该方法不是非常依赖于探空数据的垂直分辨率。因RI方法综合考虑潜位温(潜位温与温度、压强和湿度相关)和风速,与上述方法仅仅关注一种大气参数相比更准确,因此RI方法被认为是确定对流边界层或混合层高度最合适的方法之一,所以实验采用RI方法来评估基于拉曼激光雷达的PBL高度并作为对比高度。需要注意的是,探空数据一般探测的是混合层(对流边界层)高度,所以一般使用白天的探空数据并采用RI方法进行评估,然后与得到的边界层高度进行比较。
2.3 Douglas-Peucker分段算法
2.2节的方法一般都可以探测气溶胶,但是Luo等[10-11]指出尽管基于气溶胶的方法在海洋上表现良好,但气溶胶结构通常在陆地上无法提供可靠的PBL高度,则本节使用拉曼激光雷达探测的水汽数据来探测边界层高度。传统的阈值法和导数法都有自己的固有缺点,故在此基础上提出基于Douglas-Peucker(DP)分段算法的改进斜率法。
DP分段算法是简化线段的经典算法之一,该算法的原始形式是由Douglas等[20-21]提出的,当简化曲线时,其可以提供最接近原始信号点的近似值。Gong等[22-24]在气溶胶激光雷达领域中使用了该算法,当简化信号或曲线(如优化的激光雷达的垂直廓线信号)时,该算法的目标是找到具有更少的相似信号或曲线,这样的相似信号或曲线通常是重要的数据,其可以保留描述原始信号或曲线的主要变化趋势。
DP分段算法的基本原理:以拉曼激光雷达系统探测的水汽混合比的垂直廓线数据为例,首先选取适当的阈值(1.2g/kg),将最高点和最低点的水汽数据作为简化后的点,并将最高点和最低点连线,在最高点和最低点之间寻找离连线差值最大的点;然后比较差值与阈值,若差值大于阈值,则此点为简化点,若小于阈值,则此点不为简化点;接着将所有相邻简化点连线,在每两个简化点之间寻找与连线差值最大的点,再与阈值比较,如此反复,直到寻找到所有的简化点。阈值的选取对简化点的影响很大,对于水汽混合比数据,由于边界层顶的水汽含量在一般情况下会急剧下降,所以采用阈值为1.2g/kg即可满足简化需求。
2.4 DP分段算法寻找边界层高度
DP分段算法可以有效地简化数据,尤其对于边界层,其垂直结构对应的水汽是分层的。一般来说最底层部分的水汽含量基本不变,其随着高度的上升,当快到边界层顶的时,水汽含量急剧下降,下降到一定值后,水汽含量又开始缓慢变化。根据边界层水汽含量的这种变化规律,可以先对拉曼激光雷达系统探测的水汽数据进行分层(分段),寻找边界层顶水汽含量急剧减小的过渡层,最后再确定边界层顶的高度。
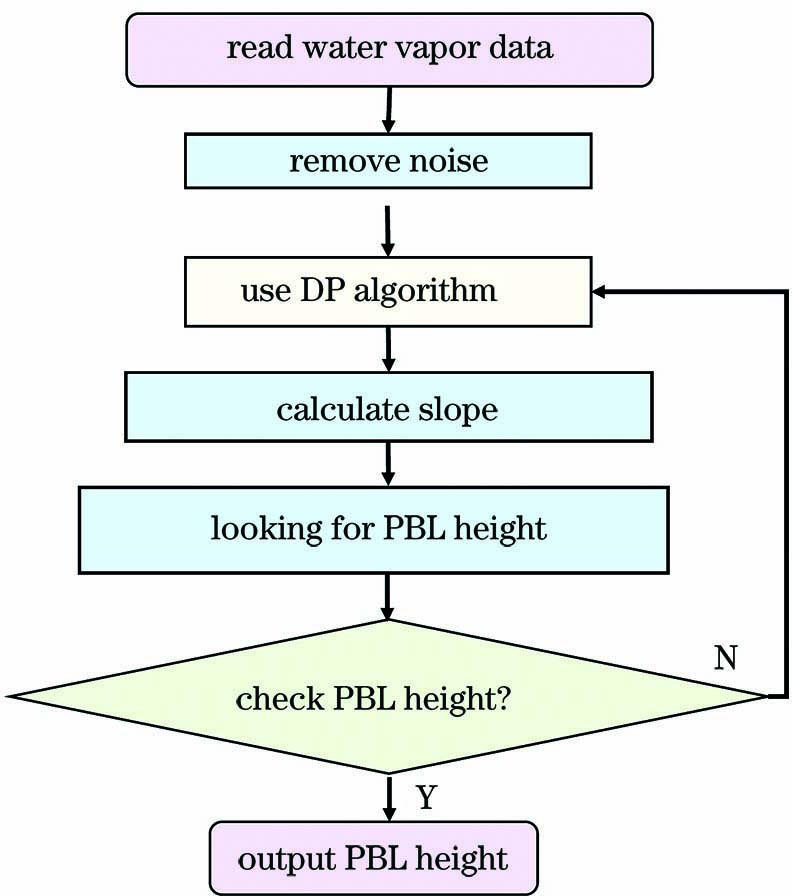
从拉曼激光雷达系统探测的水汽数据中获取PBL高度的算法流程如图1所示。首先对拉曼激光雷达系统探测的水汽数据进行消噪;然后对数据在时间上进行平均,采用DP分段算法对水汽的垂直廓线进行分段;最后计算每个分割点之间的斜率,当一个线段的斜率远小于其他线段的斜率(通常小于其他值的两倍)时,判断该斜率所在的层就是边界层顶所在的层,称之为过渡层。如果在最小斜率附近有两层的斜率值相近,则将其与前一时刻的高度进行比较,并获取与前一时刻高度最接近的高度。寻找到的高度需要与前一时刻进行对比,如果差值过大则需要重新分段来寻找。以上方法称之为DP斜率法,采用该算法来检测水汽垂直廓线即可寻找边界层高度。

Figure 1.Flow chart of PBL height is obtained by DP segmentation algorithm
3 结果与讨论
3.1 反演结果
在气象学中,通常将PBL高度与探空数据进行比较[1,10]。采用探空方法可以获得位温、风场和温度等数据,然后采用RI方法可以得到PBL高度,结果如图2所示,图中水平虚线为DP斜率法寻找到的边界层高度(hDP),水平点线为探空数据寻找到的边界层高度(hRI),位温与水汽含量的对应关系如表2所示。当水汽含量在垂直方向的变化规律单一时,可以采用阈值法来确定PBL高度,但在不同的天气条件甚至一天的不同时间下,水汽含量有所不同,因此一般将导数最小值所在的高度作为PBL高度。为了验证2.4节描述的DP斜率法与2.2节算法的区别,将水汽的垂直廓线和水汽垂直廓线的导数都放在一张图像中,如图2所示。通常,SGP站点会在每天的5:30、11:30、17:30和23:30左右释放4个探测气球,但采用RI法得到的边界层高度为对流边界层高度或者混合层高度,只有在中午或者下午时混合层高度才会等于稳定边界层高度,所以一般选取当地白天的探空数据作为对比。
Figure 2.Vertical profiles based on water vapor data of Raman lidar at different times. (a) 5:30; (b) 11:30; (c) 17:30; (d) 21:30
| Potential temperature/K | Water vapor/(g·kg-1) |
|---|
| 263 | 0 |
| 273 | 4 |
| 283 | 8 |
| 293 | 12 |
| 303 | 16 |
| 313 | 20 |
| 323 | 24 |
Table 2. Relationship between potential temperature and water vapor content
从图2可以看到,采用拉曼激光雷达系统探测到的水汽数据来反演边界层高度是可行的。如果仅使用导数法,则应找到最小导数即导数的垂直廓线上的最小值点(hFD)。从图2(c)可以看到,所提方法与RI方法得到的高度几乎完全一致,而采用导数法(导数最小处)却有明显偏差。从图2(b)可以看到,虽然高度有偏差,但得到的边界高度hDP与位温的跃变点吻合得很好;从图2(d)可以看到,因为有两个导数值相近的极小值点,所以无法准确找到边界层顶所在的高度,而采用DP斜率法可以准确找到hDP。由以上分析可以得到,采用拉曼激光雷达系统探测的水汽数据来反演边界层高度是可行的,并且采用DP斜率法是有效的。采用DP斜率法对2018年5月27日的全天数据进行反演,并将得到的高度标注出来,结果如图3所示。
Figure 3.Boundary layer heights retrieved by DP slope algorithm
从图3可以看到,使用拉曼激光雷达探测到的水汽数据来检测PBL高度是非常可行的;在18:00~22:00之间,地面附近的水汽含量很低并且下降速度缓慢,如果采用导数法或阈值法进行检测,则可能得到错误的PBL高度;在其他时间段,尤其是当反转层较宽时,采用导数法可能导致PBL高度过高,这与垂直层中水汽混合比的变化速率直接相关;当水汽混合比变化缓慢或存在分层时,可以采用DP斜率法来改善这些差异。
3.2 与探空数据的统计对比
为了评估所提算法的有效性,对2018年和2019年从5~9月使用拉曼激光雷达系统探测的hDP和hRI进行统计。由于采用RI方法得到的是对流边界层也就是混合层的高度,所以选取11:30和17:30的探空数据并与拉曼激光雷达探测的数据进行对比。研究过程中发现有降水的情况,采用的水汽含量不能有效探测边界层高度,所以除去明显的降水天气,统计数据结果如图4所示,图中对角虚线表示x轴和y轴数值相等。
Figure 4.Boundary layer heights based on Raman lidar water vapor data and sounding data
从图4可以看到,基于拉曼激光雷达水汽数据和探空数据的边界层高度在整体上是吻合的,但是有很多点相差较大,并且RI方法寻找的边界层高度偏低。如2.2节所述,边界层高度偏低的原因是探空数据一般探测的是混合层高度,由于一些天气的原因(水平气流相遇或多云天等)会造成白天的混合层高度还未达到边界层高度,致使RI方法寻找的边界层高度偏低。
3.3 讨论
针对RI方法寻找的边界层高度比水汽数据偏低的情况,对偏差天气和吻合天气进行对比分析。当水平气团相遇时,一个气团会被另外一个气团抬升而导致水汽分层,此时采用水汽数据寻找到的边界层高度和RI方法寻找到的边界层高度差距非常大,结果如图5所示。
从图5可以看到,在11:30左右,探空数据获得的边界层高度和拉曼激光雷达探测的边界层高度之间的偏差非常大,但是在17:30两者的数据基本吻合,此偏差是由水平气团碰撞而导致边界层的抬升,此时混合层的高度还未上升到边界层高度。在此情况下,探空数据寻找到的是混合层高度,拉曼激光雷达探测的水汽混合比寻找到的是边界层高度,所以两者高度不同。如果去除明显的强水平气团碰撞天气,可以得到的边界层高度如图6所示。从图6可以看到,此时两者吻合得非常好,但还是有一些点偏差较大,原因可能是并未除去所有水平对流天气,也有可能是由云天限制湍流的发展速度,导致混合层高度还未抬升至边界层高度,甚至也有可能是探空数据与激光雷达有位置偏差,这还需要进一步研究。从图6可以看到,采用拉曼激光雷达探测的水汽数据来反映边界层高度是可行的,并且为边界层高度和混合层高度之间的关联性奠定研究基础。
Figure 5.Height agreement of boundary layer based on Raman lidar and airsonde data
Figure 6.Comparison of boundary layer heights based on Raman lidar water vapor data and radiosonde data
4 结论
首先阐述边界层高度的研究意义,然后介绍SGP站点,最后简要介绍反演边界层高度的阈值法、导数法和RI法等,并指出探空数据不能给出连续时间的边界层高度,气溶胶数据由于在边界层顶的梯度往往不够明显而不能准确提供边界层高度。针对上述问题,利用拉曼激光雷达系统得到的垂直水汽混合比数据来反演边界层高度,首先采用DP算法对水汽混合比数据进行简化分段,然后对每一段求斜率,最后根据斜率寻找过渡层,进而得到边界层的高度。将所提算法与传统的导数法进行对比,结果表明DP分段算法所得的结果更优。随后将所得结果与探空数据进行对比,并对不同天气情况下的统计情况进行分析,结果表明所提算法和探空数据吻合得较好。对出现的偏差进行分析讨论,不一致的原因可能是由水平气团相撞所致,也有可能是其他原因,这需要进一步探索。实验结果为研究边界层和混合层的关联奠定研究基础。综上所述,采用拉曼激光雷达探测的水汽数据能够很好地探测边界层高度的日变化,并可用于对拉曼激光雷达水汽数据进行统计分析,为气象预报、大气边界层参数化和模式研究等奠定基础。
References
[1] Stull R B. Mean boundary layer characteristics[M]. //Stull R B. An introduction to boundary layer meteorology. Atmospheric sciences library. Dordrecht: Springer, 13, 1-27(1988).
[2] Oke T R. Boundary layer climates[M]. London: Routledge(1987).
[3] Wang Z E, Sassen K. Cloud type and macrophysical property retrieval using multiple remote sensors[J]. Journal of Applied Meteorology, 40, 1665-1682(2001). http://adsabs.harvard.edu/abs/2001japme..40.1665w
[4] Flamant C, Pelon J, Flamant P H et al. Lidar determination of the entrainment zone thickness at the top of the unstable marine atmospheric boundary layer[J]. Boundary-Layer Meteorology, 83, 247-284(1997). http://www.springerlink.com/content/r4v3x1q035v1727q/
[5] Lee X. Fundamentals of boundary-layer meteorology[M]. Cham: Springer(2018).
[6] Wang Y F, Cao X M, Zhang J et al. Detection and analysis of all-day atmospheric water vapor Raman lidar based on wavelet denoising algorithm[J]. Acta Optica Sinica, 38, 0201001(2018).
[7] Shi D C, Hua D X, Huang B et al. Influence of ultraviolet wavelength selection on detection performance of all-day water vapor Raman lidar[J]. Acta Optica Sinica, 38, 1228003(2018).
[8] Klett J D. Stable analytical inversion solution for processing lidar returns[J]. Applied Optics, 20, 211-220(1981).
[9] Fernald F G. Analysis of atmospheric lidar observations: some comments[J]. Applied Optics, 23, 652-653(1984).
[10] Luo T, Yuan R, Wang Z. Lidar-based remote sensing of atmospheric boundary layer height over land and ocean[J]. Atmospheric Measurement Techniques, 7, 173-182(2014).
[11] Luo T, Wang Z E, Zhang D M et al. Marine boundary layer structure as observed by A-train satellites[J]. Atmospheric Chemistry and Physics, 16, 5891-5903(2016). http://adsabs.harvard.edu/abs/2016ACP....16.5891L
[13] Sisterson D L, Peppler R A, Cress T S et al. The ARM southern great plains (SGP) site[J]. Meteorological Monographs, 57, 6(2016).
[14] Newsom R K. Ramanlidar (RL) handbook[R]. Department of Energy: OSTI(2009).
[15] Melfi S H, Spinhirne J D, Chou S H et al. Lidar observations of vertically organized convection in the planetary boundary layer over the ocean[J]. Journal of Climate and Applied Meteorology, 24, 806-821(1985).
[16] Boers R, Spinhirne J D, Hart W D. Lidar observations of the fine-scale variability of marine stratocumulus clouds[J]. Journal of Applied Meteorology, 27, 797-810(1988).
[17] Sicard M, Pérez C, Rocadenbosch F et al. Mixed-layer depth determination in the Barcelona coastal area from regular lidar measurements: methods, results and limitations[J]. Boundary-Layer Meteorology, 119, 135-157(2006). http://link.springer.com/article/10.1007/s10546-005-9005-9
[18] Hayden K L, Anlauf K G, Hoff R M et al. The vertical chemical and meteorological structure of the boundary layer in the Lower Fraser Valley during Pacific '93[J]. Atmospheric Environment, 31, 2089-2105(1997).
[19] Vogelezang D H P, Holtslag A M. Evaluation and model impacts of alternative boundary-layer height formulations[J]. Boundary-Layer Meteorology, 81, 245-269(1996).
[20] Douglas D H, Peucker T K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature[J]. Cartographica: the International Journal for Geographic Information and Geovisualization, 10, 112-122(1973). http://onlinelibrary.wiley.com/doi/10.1002/9780470669488.ch3/pdf
[21] Feng C Z, Wu S H, Liu B Y. Research on wind retrieval method of coherent Doppler lidar and experimental verification[J]. Chinese Journal of Lasers, 45, 0410001(2018).
[22] Gong W, Mao F Y, Song S L. Signal simplification and cloud detection with an improved Douglas-Peucker algorithm for single-channel lidar[J]. Meteorology and Atmospheric Physics, 113, 89-97(2011).
[23] Mao F Y, Gong W, Zhu Z M. Simple multiscale algorithm for layer detection with lidar[J]. Applied Optics, 50, 6591-6598(2011). http://www.opticsinfobase.org/abstract.cfm?uri=ao-50-36-6591
[24] Mao F Y, Li J, Li C et al. Nonlinear physical segmentation algorithm for determining the layer boundary from lidar signal[J]. Optics Express, 23, A1589-A1602(2015).