
Zefenfen Jin, Zhiqiang Hou, Wangsheng Yu, Xin Wang. Multiple Feature Fusion based on Covariance Matrix for Visual Tracking[J]. Acta Optica Sinica, 2017, 37(9): 0915005
- Acta Optica Sinica
- Vol. 37, Issue 9, 0915005 (2017)
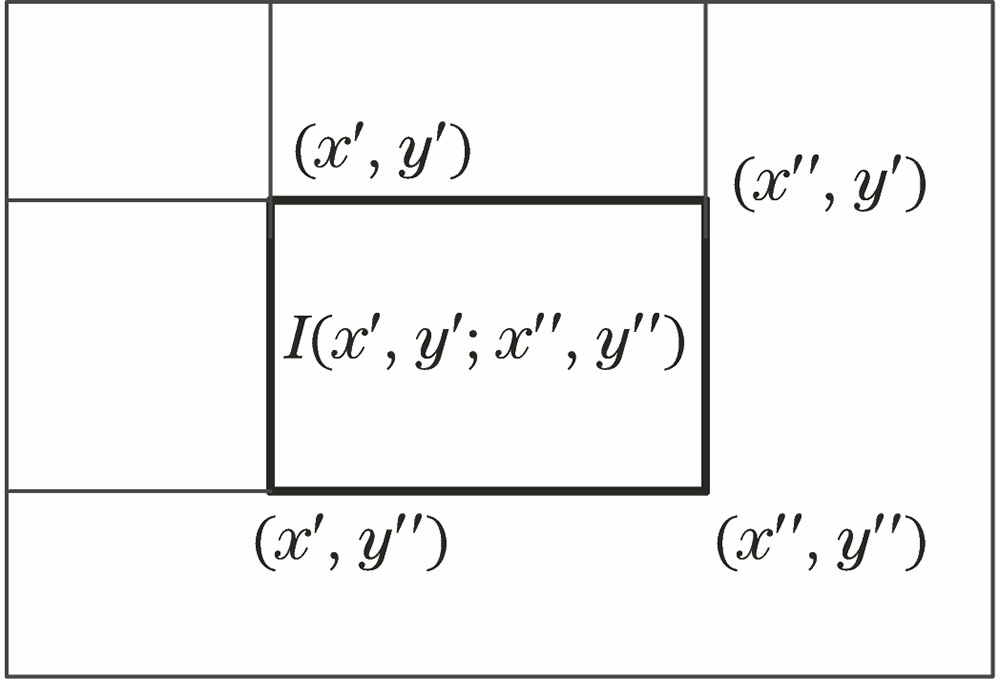
Fig. 1. Integral image
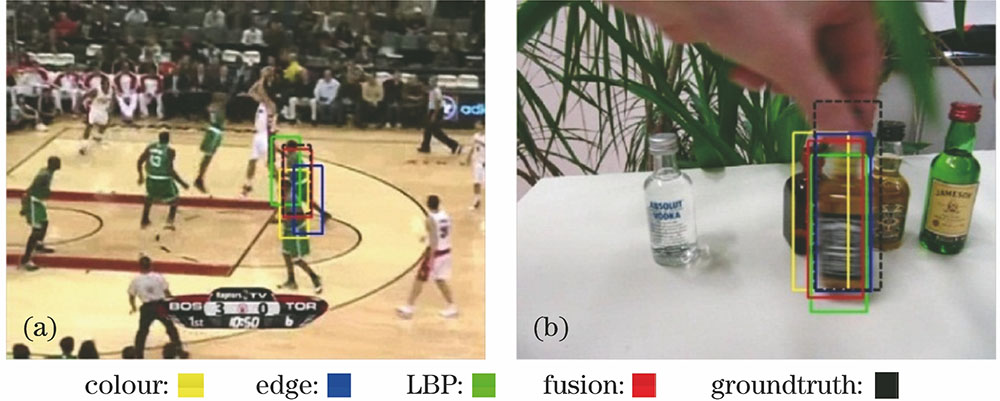
Fig. 2. Comparison of tracking results of different features. (a) The 649th frame of Basketball sequence; (b) the 873rd frame of Liquor sequence
Fig. 3. Population generation method of the ith frame
Fig. 4. Qualitative comparison of eight tracking algorithms. (a) Basketball; (b) Bolt; (c) David3; (d) Football1; (e) Jumping; (f) Liquor; (g) Matrix; (h) Skiing; (i) Ironman; (j) Jogging1; (k) Lemming; (l) MotorRolling
Fig. 5. Center position error curves. (a) Basketball; (b) Bolt; (c) David3; (d) Football1; (e) Jumping; (f) Liquor; (g) Matrix; (h) Skiing; (i) Ironman; (j) Jogging1; (k) Lemming; (l) MotorRolling
Fig. 6. Overlap rate curves. (a) Basketball; (b) Bolt; (c) David3; (d) Football1; (e) Jumping; (f) Liquor; (g) Matrix; (h) Skiing; (i) Ironman; (j) Jogging1; (k) Lemming; (l) MotorRolling
Fig. 7. Curves of precision and success rate. (a) Precision; (b) success rate
Fig. 8. Comparison of tracking precision under 11 scenes
Fig. 9. Comparison of tracking success rate under 11 scenes
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Generative rules of rotation angle of quantum rotation gate
|
Table 2. Comparison of coverage rate of tracking results%
|
Table 3. Comparison of average center position error of tracking resultspixel

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20