
Guimei Gu, Chong Chen, Xiaoning Yu, Cunjun Zhang, Zhen Tong, Xiaoyun Mei. Target Location Algorithm of Contact Network Pipe Cap Based on Improved Faster R-CNN[J]. Laser & Optoelectronics Progress, 2022, 59(4): 0410009
- Laser & Optoelectronics Progress
- Vol. 59, Issue 4, 0410009 (2022)
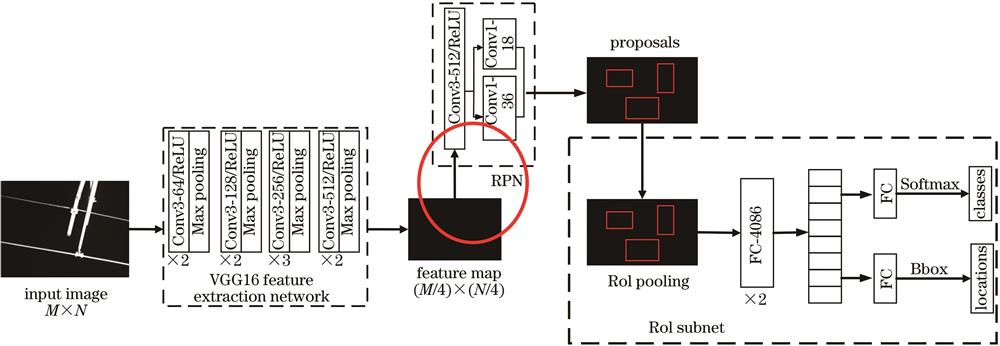
Fig. 1. Faster R-CNN deep learning model based on VGG16
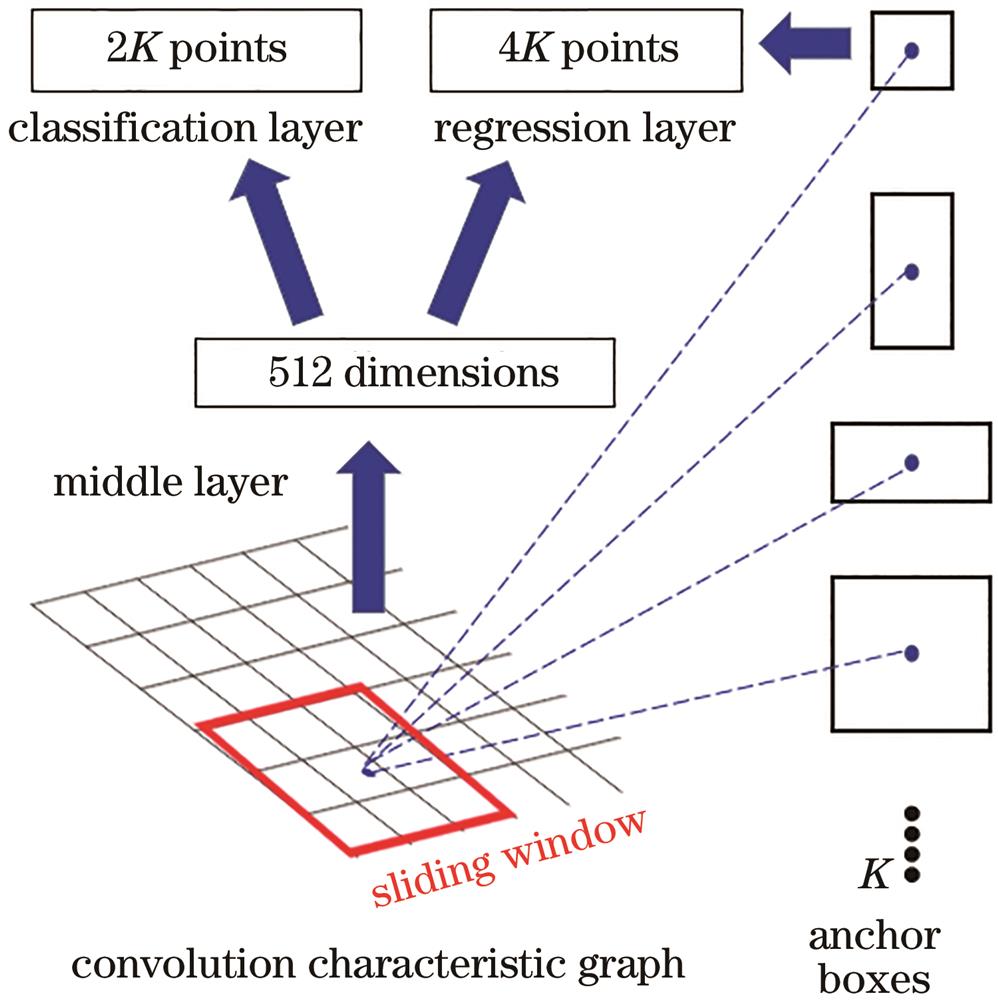
Fig. 2. Structure of RPN network
Fig. 3. Clustering. (a) Relationship between k value and accuracy; (b) clustering result
Fig. 4. Results of four training losses. (a) VGG16 model; (b) resnet50 model; (c) resnet101 model; (d) resnet152 model
Fig. 5. Training loss of different feature extraction network models
Fig. 6. Relationship between model precision and number of iterations. (a) VGG16 model; (b) resnet50 model; (c) resnet101 model; (d) resnet152 model
Fig. 7. Relationship between model recall and number of iterations. (a) VGG16 model; (b) resnet50 model; (c) resnet101 model; (d) resnet152 model
Fig. 8. Target location results of contact network pipe cap. (a) VGG16 positioning results; (b) K-means+VGG16 positioning results; (c) resnet50 positioning results; (d) K-means+resnet50 positioning results; (e) resnet101 positioning results; (f) K-means+resnet101 positioning results; (g) resnet152 positioning results; (h) K-means+resnet152 positioning results
|
Table 1. Parameters of VGG 16 network convolution process
|
Table 2. Comparison of deep learning network

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20