
Bin Zhang, Chuanbing Xiong. Automatic Point Cloud Registration Based on Voxel Downsampling and Key Point Extraction[J]. Laser & Optoelectronics Progress, 2020, 57(4): 041008
- Laser & Optoelectronics Progress
- Vol. 57, Issue 4, 041008 (2020)
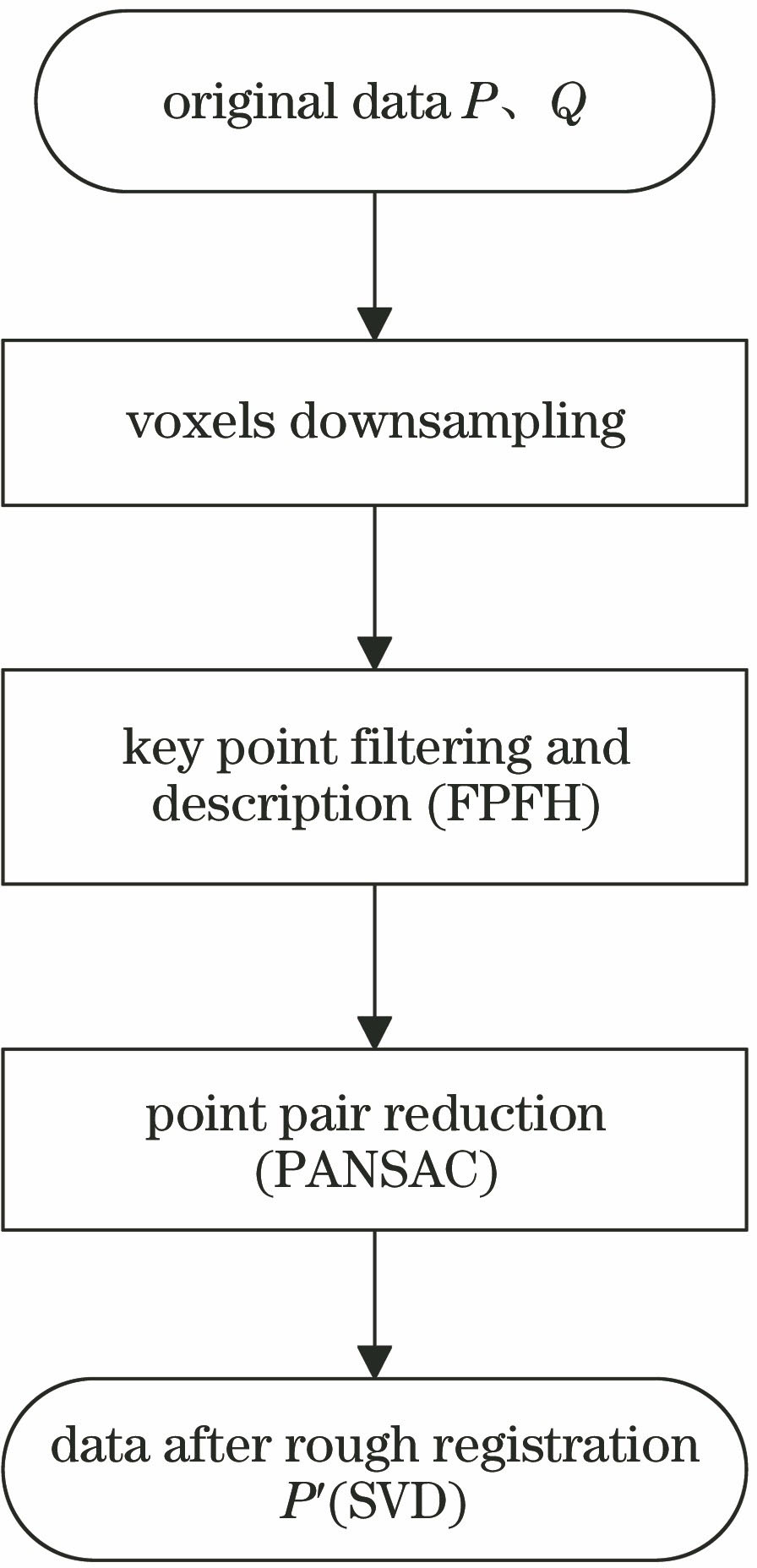
Fig. 1. Rough registration algorithm flow chart
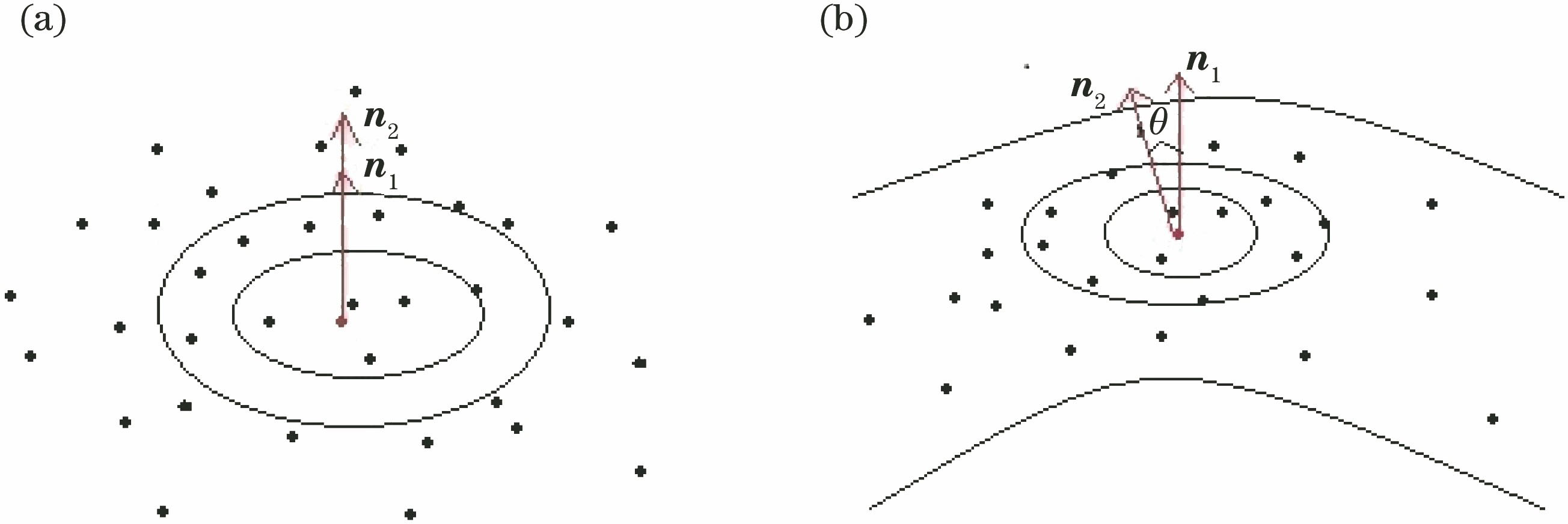
Fig. 2. Normal vectors in different regions. (a) Flat region; (b) undulating region
Fig. 3. Original point cloud data. (a) Bunny45 original point cloud; (b) dragon00 original point cloud
Fig. 4. Iterative estimation of voxel side length L
Fig. 5. View of point cloud after voxel downsampling. (a) Voxel downsampling point cloud based on bunny45 data;(b) voxel downsampling point cloud based on dragon00 data
Fig. 6. Extraction effect of key points under different algorithms based on bunny45 data and dragon00 data. (a)(d) Algorithm in Ref. [6]; (b)(e) algorithm in Ref. [7]; (c)(f) our algorithm
Fig. 7. Matching results of corresponding key point pairs. (a)(c) Unstreamlined feature points matching; (b)(d) streamlined feature points matching
Fig. 8. Rough registration effect of different algorithms. (a)(e) Original point cloud before registration; (b)(f) preliminary rough registration effect of algorithm in Ref. [6]; (c)(g) preliminary rough registration effect of algorithm in Ref. [7]; (d)(h) rough registration effect of our algorithm
Fig. 9. Fine registration effect of rough registration results for different algorithms. (a)(d) Fine registration effect for algorithm in Ref. [6]; (b)(e) fine registration effect for algorithm in Ref. [7]; (c)(f) fine registration effect for our algorithm
| ||||||||||||||||||||||||||||||
Table 1. Comparison of rough registration error and running time of each algorithm
| |||||||||||||||||||||||||||
Table 2. Comparison of fine registration error and total registration time of rough registration results for each algorithm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20