
Tengfei Zhou, Xiaojun Cheng, Kai Huang, Yuan Tao. Self-Calibration Model of Terrestrial Three-Dimensional Laser Scanners Considering Random Errors and Robust Estimation Solution[J]. Chinese Journal of Lasers, 2021, 48(13): 1304002
- Chinese Journal of Lasers
- Vol. 48, Issue 13, 1304002 (2021)
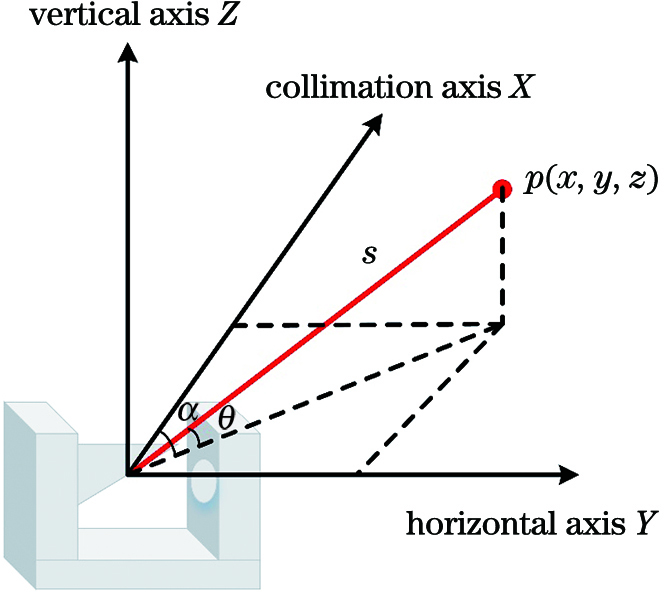
Fig. 1. Observation principle of terrestrial three-dimensional laser scanner
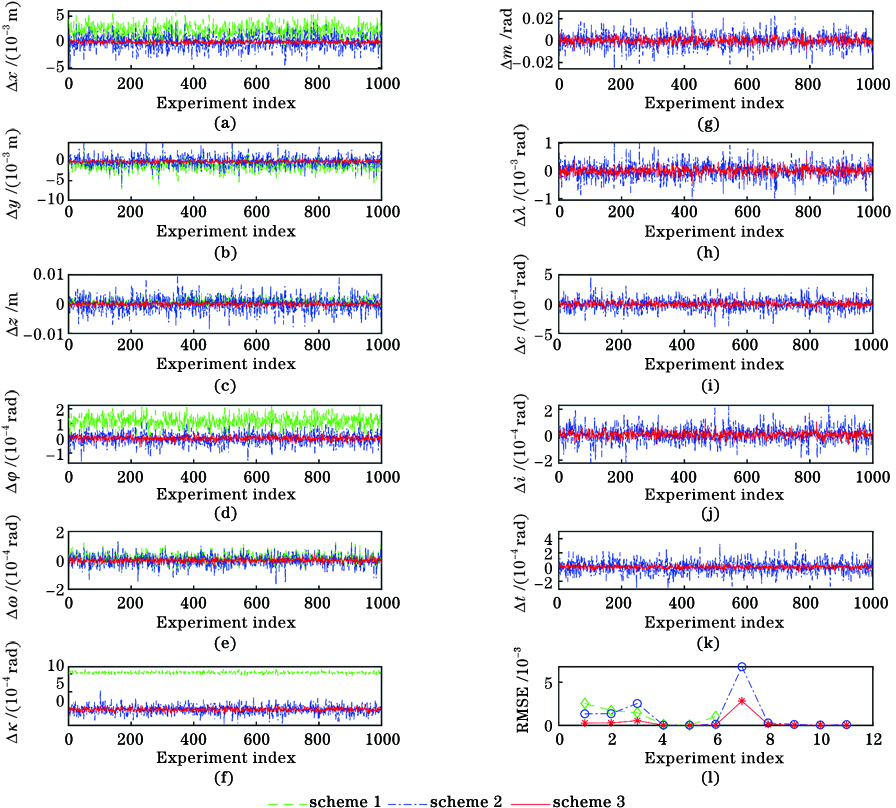
Fig. 2. Parameter differences and RMSE. (a) Translation parameter Δx; (b) translation parameter Δy; (c) translation parameter Δz; (d) rotation parameter Δφ; (e) rotation parameter Δω; (f) rotation parameter Δκ; (g) addition constant Δm; (h) multiplication constant Δλ; (i) aiming axis error Δc; (j) horizontal axis error Δi; (k) vertical axis error Δt; (l) RMSE
Fig. 3. RMSE of common point and check point. (a) x component of common point; (b) y component of common point; (c) z component of common point; (d) positional precision of common point; (e) x component of check point; (f) y component of check point; (g) z component of check point; (h) positional precision of check point
| |||||||||||||||||||||||||||||||||
Table 1. True values of unknown parameters
| ||||||||||||||||||
Table 2. Prior information of original observations
|
Table 3. Calculation results of real data

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20