
Qili Chen, Wenjing Chen. Coaxial Three-Dimensional Measurement Method of Divergent Circular Fringe Projection[J]. Acta Optica Sinica, 2022, 42(19): 1912004
- Acta Optica Sinica
- Vol. 42, Issue 19, 1912004 (2022)
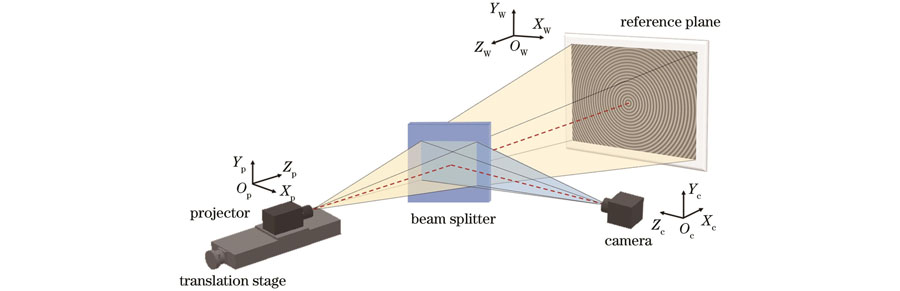
Fig. 1. Schematic diagram of coaxial measurement system
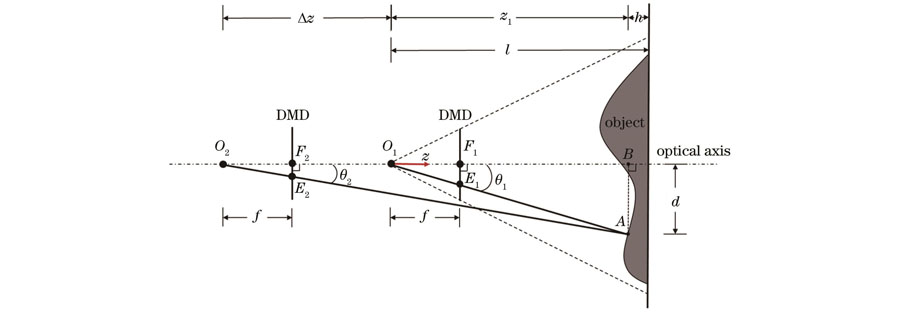
Fig. 2. Schematic diagram of ray geometric model of projector at two projection positions
Fig. 3. Coaxial projection-imaging model
Fig. 4. Fringe patterns captured by virtual camera under different Lp. (a) Lp=690 mm; (b) Lp=710 mm; (c) Lp=730 mm; (d) Lp=750 mm; (e) Lp=770 mm
Fig. 5. Absolute phases corresponding to five projection positions. (a) Three-dimensional graph; (b) section of absolute phases passing through center of circle
Fig. 6. Planar reconstruction results. (a) Whole height information; (b) height section of row passing through center of circle; (c) height information of area away from center of circle; (d) height section of row away from center of circle
Fig. 7. Ladder round platform. (a) Three-dimensional view; (b) sectional view
Fig. 8. Simulation results of ladder round platform. (a) Reconstruction result; (b) height section at 360th line; (c) error distribution
Fig. 9. Object to be measured
Fig. 10. Simulation results of ellipsoid under different small angles. (a)-(c) 2°; (d)-(f) 4°; (g)-(i) 6°
Fig. 11. Experimental setup
Fig. 12. Reconstruction experiment of face model. (a) Measured object; (b) four phase shift fringe patterns; (c) reconstruction result; (d) section of reconstruction surface at 248th line
Fig. 13. Reconstruction experiment of steps. (a) Measured object; (b) one frame of fringe pattern; (c) reconstruction result of dashed line area
|
Table 1. Reconstruction accuracy of different movement times
|
Table 2. Main point calibration results of each position

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20