
Yujing Qiao, Shizheng Tan, Jingang Jiang. Planning Strategy for Multi-Visual Measurement Networking[J]. Acta Optica Sinica, 2018, 38(5): 0515005
- Acta Optica Sinica
- Vol. 38, Issue 5, 0515005 (2018)
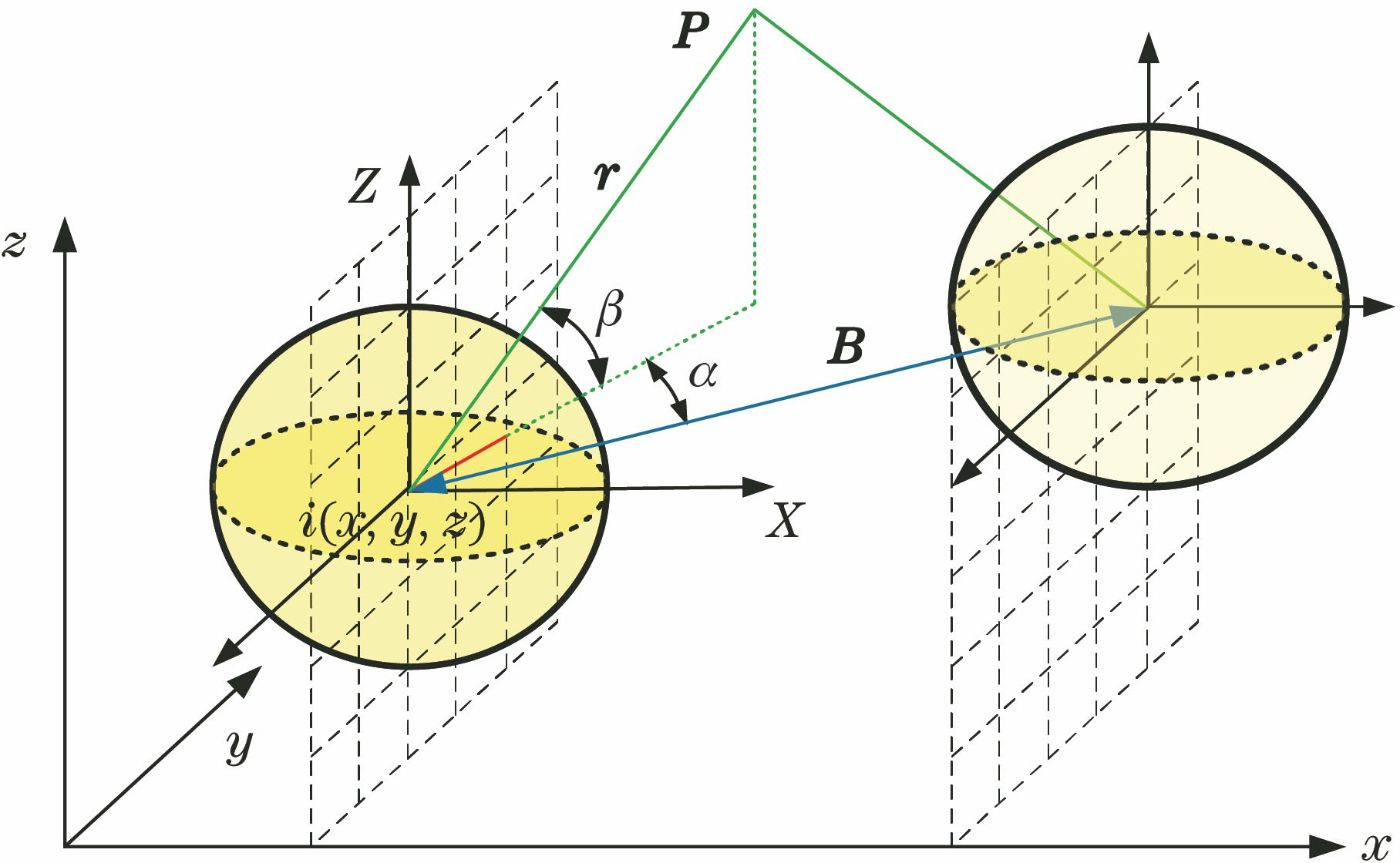
Fig. 1. Geometric model of discrete measurement
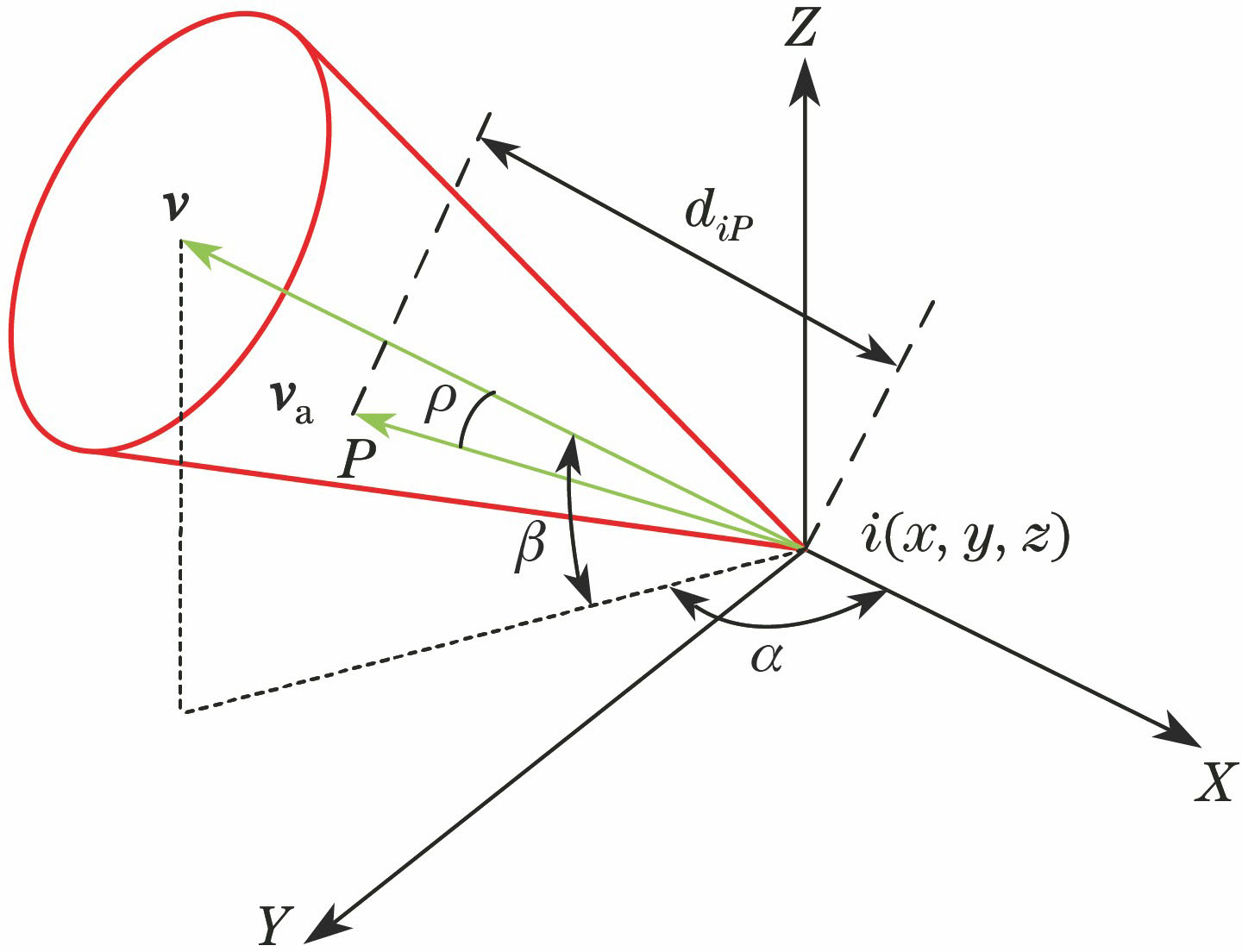
Fig. 2. Camera coverage model
Fig. 3. Schematic of visibility constraint
Fig. 4. Schematic of incident angle constraint
Fig. 5. Schematic of field of view constraint
Fig. 6. Schematic of depth constraint
Fig. 7. Schematic of practical measurement model. (a) Top view of propeller body; (b) front view of propeller body
Fig. 8. Simulation model of measured object
Fig. 9. Convergence procedure of first objective function
Fig. 10. Convergence procedure of second objective function
Fig. 11. Network layout of visual measurement
Fig. 12. Measurement model
Fig. 13. Comparison of three-dimensional uncertainty and standard deviation
Fig. 14. Three-dimensional reconstruction effect of measurement object
| |||||||||||||||||||||||||||||||||||||||||||||
Table 1. Comparison of measurement network coverage and measurement accuracy

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20