
Zhenyang Hui, Zhuoxuan Li, Penggen Cheng, Zhaochen Cai, Xianchun Guo. LiDAR Point Object Primitive Obtaining Based on Multiconstraint Graph Segmentation[J]. Laser & Optoelectronics Progress, 2024, 61(10): 1037001
- Laser & Optoelectronics Progress
- Vol. 61, Issue 10, 1037001 (2024)
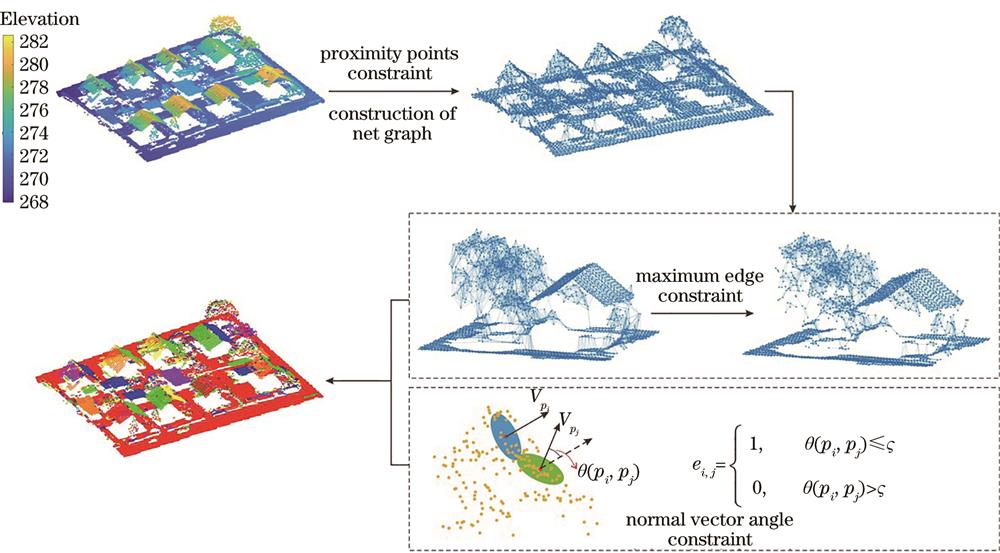
Fig. 1. Flowchart of multiconstraint graph segmentation

Fig. 2. Angle of normal vectors. (a) Sketch map of normal vector angle of the neighboring building points; (b) sketch map of normal vector angle of the neighboring vegetation points
Fig. 3. Graph segmentation based on multi-constraints. (a) Result of graph segmentation based on multi-constraints; (b) enlarged version of area I; (c) enlarged version of area II
Fig. 4. Study areas. (a) Area1; (b) Area2; (c) Area3; (d) Area4; (e) Area5
Fig. 5. Comparison of the point cloud segmentation results processed by different methods. (a) Proposed method; (b) DBSCAN; (c) spectral clustering method; (d) referenced segmentation result
Fig. 6. Comparison of average accuracy of point cloud segmentation results
Fig. 7. Graph segmentation based on multi-constraint results with different
|
Table 1. Accuracy comparison of point cloud segmentation
|
Table 2. Comparison of segmentation time

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20