
Jingya Yi, Tianguang Zhao, Yuxiang Wu, Zhangyu Ma, Jinyu Su. Fast Extraction Method of Stripe Center Based on Time-Continuous Frame Information Multiplexing[J]. Laser & Optoelectronics Progress, 2022, 59(19): 1912001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 19, 1912001 (2022)

Fig. 1. Extraction process of laser fringe centerline
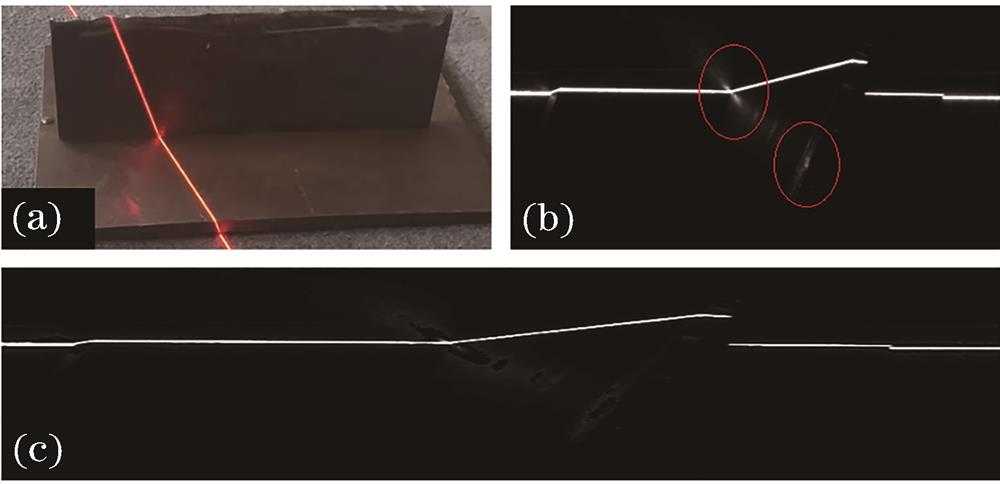
Fig. 2. Workpiece and line laser image.(a) Workpiece;(b) line laser image; (c) image processed by adaptive gamma transform algorithm
Fig. 3. Double threshold optical strip segmentation
Fig. 4. Subpixel coordinate extraction. (a) Normal direction of centerline; (b) subpixel precision centerline
Fig. 5. Flow chart of algorithm
Fig. 6. Flow chart of nearest neighbor search algorithm
Fig. 7. Diagram of nearest neighbor search
Fig. 8. Experimental system image. (a) Measuring system; (b) scanning metal workpiece
Fig. 9. Ten frames of continuous stripe pattern. (a) Frame 1; (b) frame 2; (c) frame 3; (d) frame 4; (e) frame 5; (f) frame 6; (g) frame 7; (h) frame 8; (i) frame 9; (j) frame 10
Fig. 10. Root mean square error distribution of each method
Fig. 11. 3D reconstruction of welding workpiece. (a) Metal workpiece; (b) 3D point cloud
Fig. 12. 3D reconstruction of complex workpiece. (a) Metal workpiece; (b) 3D point cloud
|
Table 1. Corresponding
|
Table 2. Running time of different methods
|
Table 3. Error analysis

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20