
Tingzuo Chen, Xiaolong Ni, Suping Bai, Xin Yu. Real-Time Acquisition and Positioning Technology of Unmanned Aerial Vehicle Optical Communication Based on Improved YOLOv4 Network[J]. Laser & Optoelectronics Progress, 2022, 59(11): 1106006
- Laser & Optoelectronics Progress
- Vol. 59, Issue 11, 1106006 (2022)
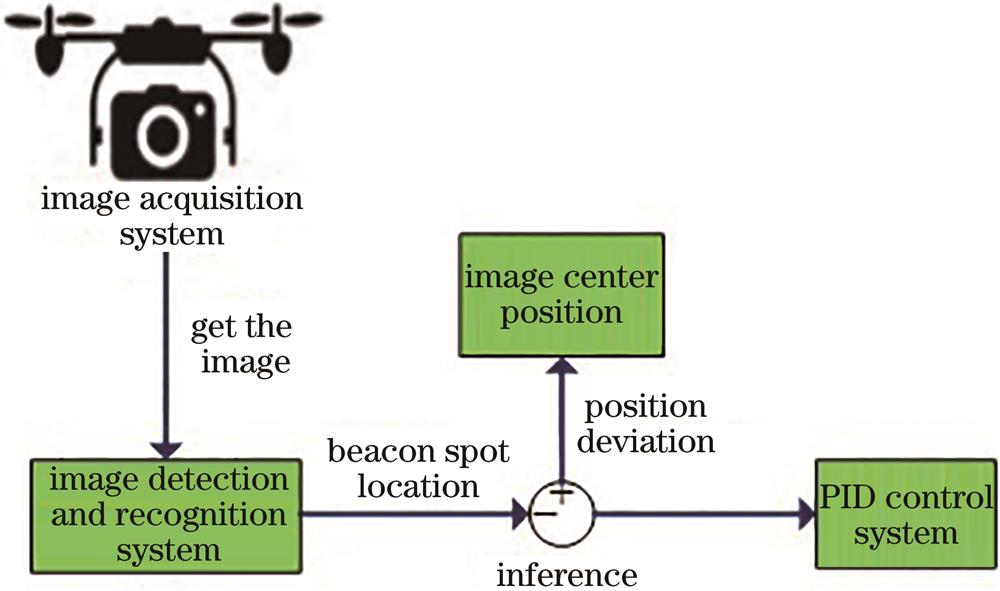
Fig. 1. Schematic diagram of the system
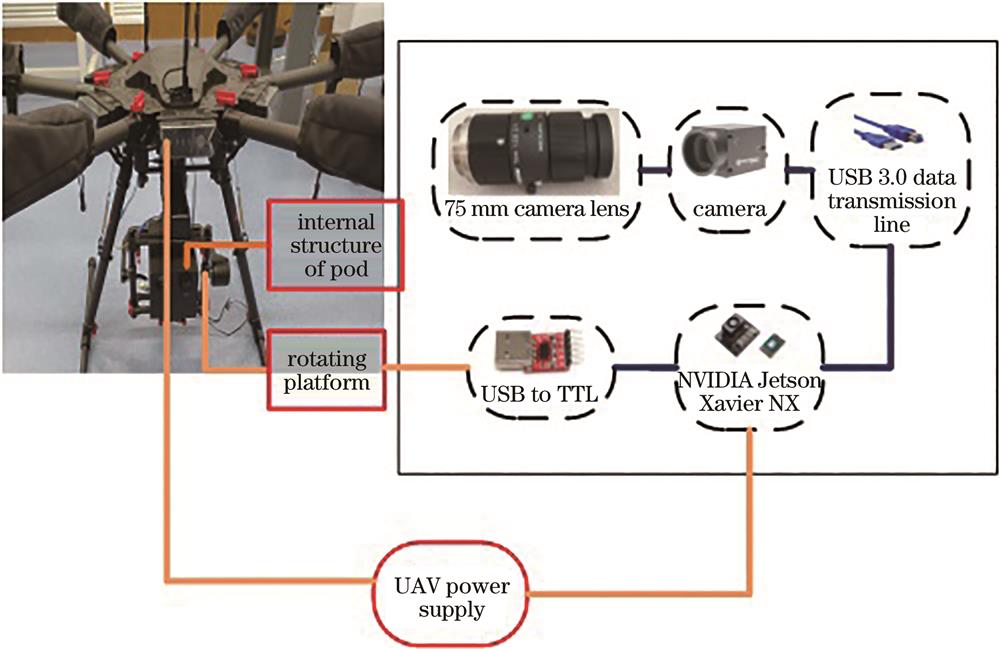
Fig. 2. Structure of the system
Fig. 3. Feature map attributes predicted by the YOLOv4 network
Fig. 4. Simplified structure of the improved YOLOv4 network
Fig. 5. Connection mode of three network structures. (a) Connection mode 1; (b) connection mode 2; (c) connection mode 3
Fig. 6. Principles of two feature fusion modes. (a) Concatenate; (b) add
Fig. 7. Flow chart of the PID algorithm
Fig. 8. Some images in the data set
Fig. 9. Training results of the beacon spot data set
Fig. 10. Training results of different networks. (a) Loss function; (b) mAP
Fig. 11. Captured alignment result of the UAV. (a) Indoor environment; (b) background glare interference environment; (c) flight status
|
Table 1. Recognition results of the test set
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Statistics of PASCAL VOC 2007 and PASCAL VOC 2012 data sets
|
Table 3. Detection results of different networks on the PASCAL VOC 2007 test set
|
Table 4. Parameters of NVIDIA Jetson Xavier NX embedded system

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20